气动机械手控制系统1 课程设计的任务与要求1
1 课程设计的任务1
熟悉三菱 FX2N PLC 的机构及使用
掌握相关的 PLC 的编程操作并实现所要求的功能
具备 PLC 的硬件设计
熟悉 PLC 仿真软件的操作和仿真
通过本次论文,进一步加强自己对机械手和 PLC 的认识,以及它们在生活中广泛应用
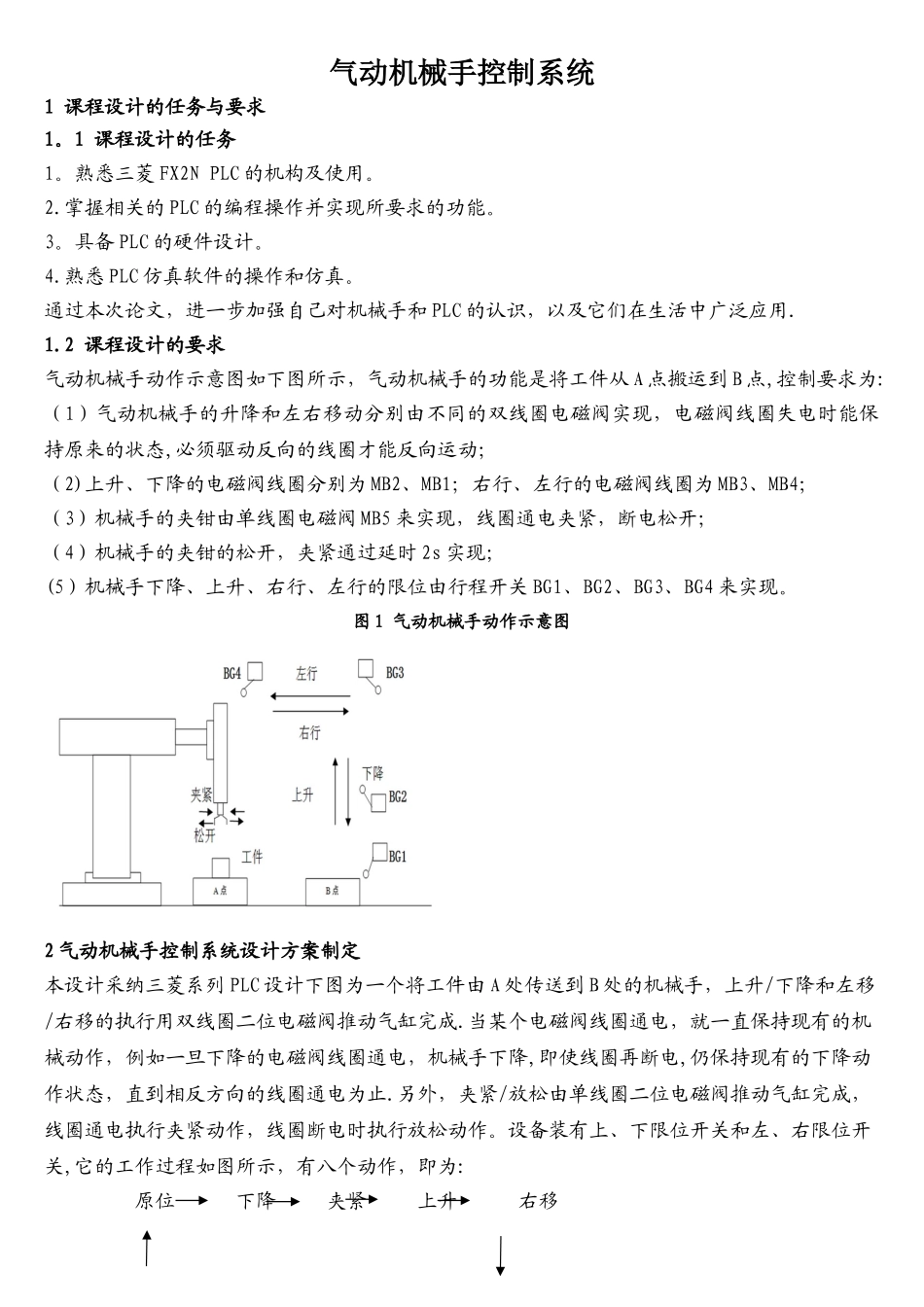
2 课程设计的要求气动机械手动作示意图如下图所示,气动机械手的功能是将工件从 A 点搬运到 B 点,控制要求为:(1)气动机械手的升降和左右移动分别由不同的双线圈电磁阀实现,电磁阀线圈失电时能保持原来的状态,必须驱动反向的线圈才能反向运动;(2)上升、下降的电磁阀线圈分别为 MB2、MB1;右行、左行的电磁阀线圈为 MB3、MB4;(3)机械手的夹钳由单线圈电磁阀 MB5 来实现,线圈通电夹紧,断电松开;(4)机械手的夹钳的松开,夹紧通过延时 2s 实现;(5)机械手下降、上升、右行、左行的限位由行程开关 BG1、BG2、BG3、BG4 来实现
图 1 气动机械手动作示意图2 气动机械手控制系统设计方案制定本设计采纳三菱系列 PLC 设计下图为一个将工件由 A 处传送到 B 处的机械手,上升/下降和左移/右移的执行用双线圈二位电磁阀推动气缸完成
当某个电磁阀线圈通电,就一直保持现有的机械动作,例如一旦下降的电磁阀线圈通电,机械手下降,即使线圈再断电,仍保持现有的下降动作状态,直到相反方向的线圈通电为止
另外,夹紧/放松由单线圈二位电磁阀推动气缸完成,线圈通电执行夹紧动作,线圈断电时执行放松动作
设备装有上、下限位开关和左、右限位开关,它的工作过程如图所示,有八个动作,即为: 原位 下降 夹紧 上升 右移 左移 上升 放松 下降 图 2 机械手的动作周期3 气动机械手控制系统设计方案实施3
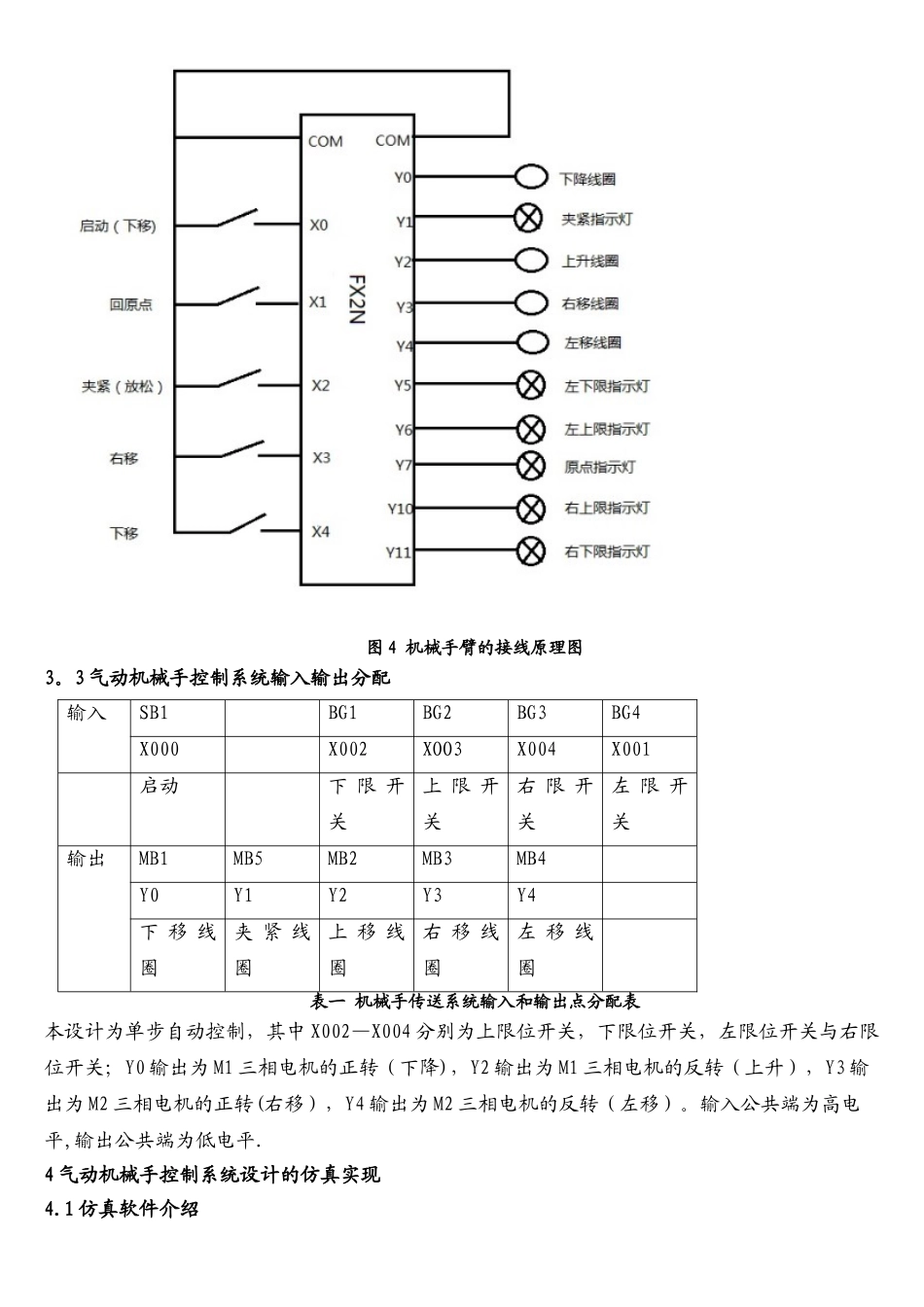
1 气动机械手控制系统电路元器件选择为实现设计目的,本设计需用到两台三相