RSLogix5000 编程软件中 PIDE 指令的使用 在 RSLogix5000 V13
0 以上编程软件版本中在 FBD 块中提供一指令 PIDE,中文名称为增强型 PID 控制指令,采纳速度增量算法,区别于传统梯形图指令 PID(位置增量算法)
PIDE 指令自带自整定功能,在PIDE 指令手动模式下,可以通过自整定来确定 P、I、D、参数,减少 PID 参数调节的时间,另外在自整定前,其 PV 类型可选(流量、压力、温度、位置等)
现将指令用法作一简要说明,以下所有图片均来源于测试工程截图
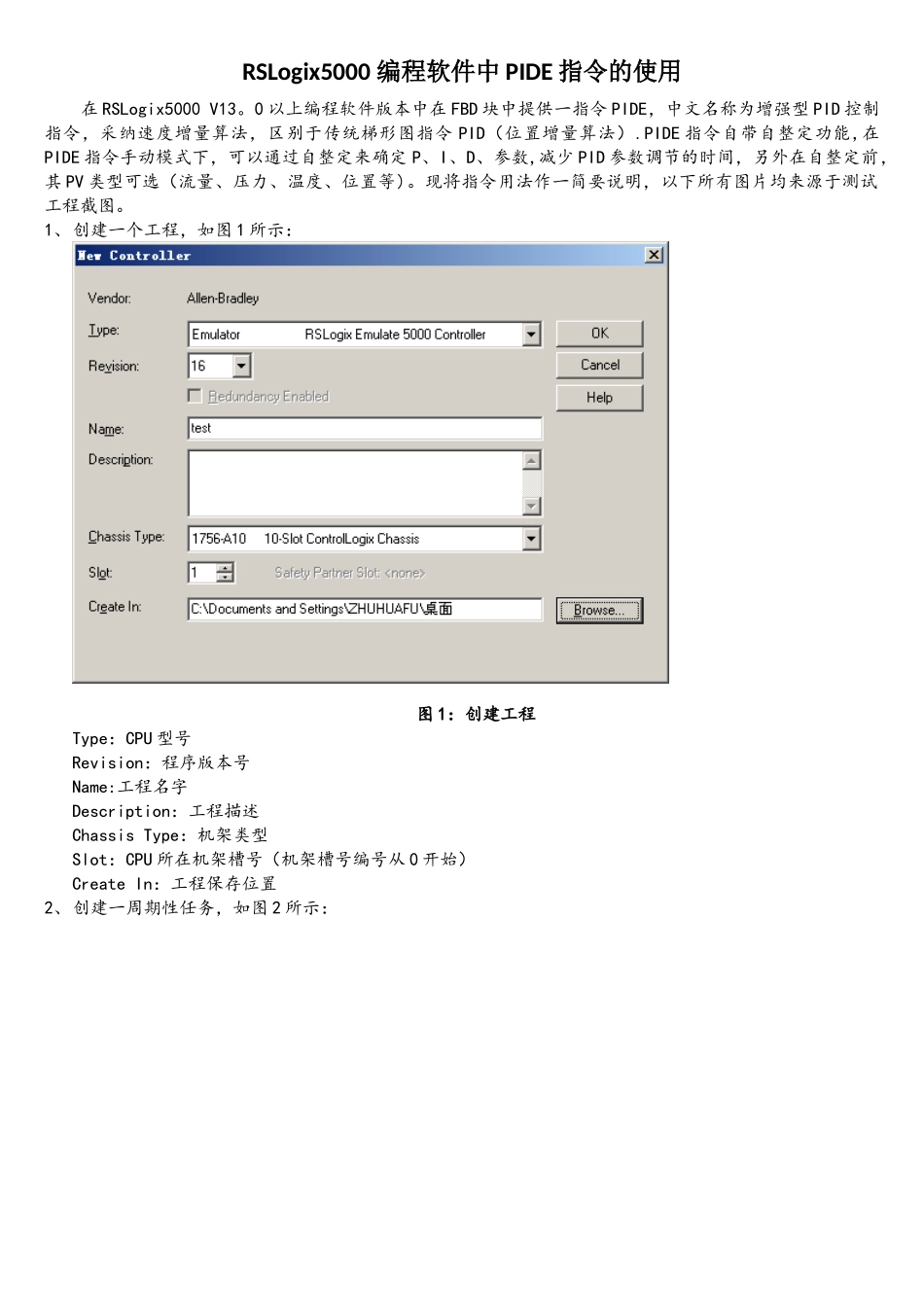
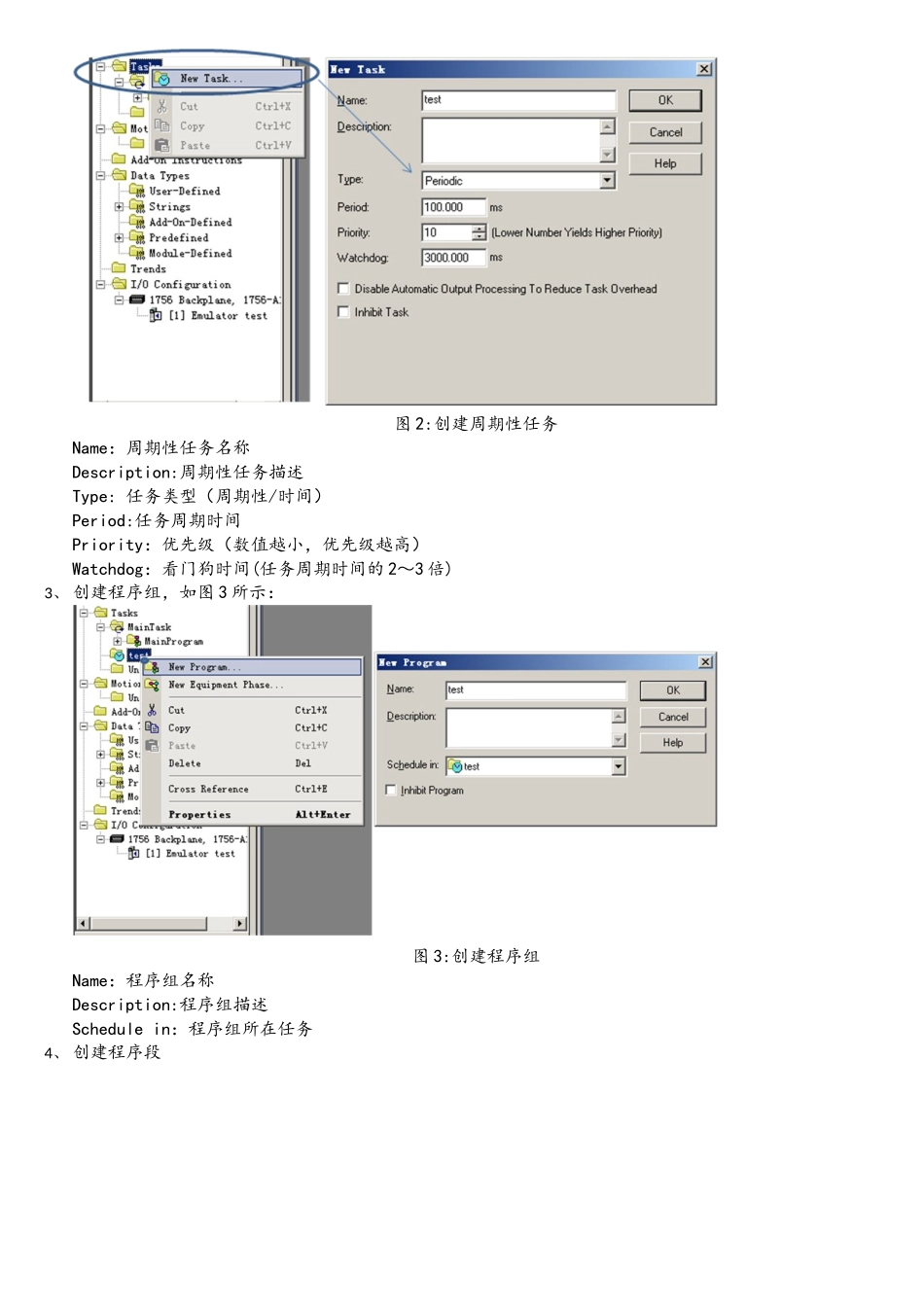
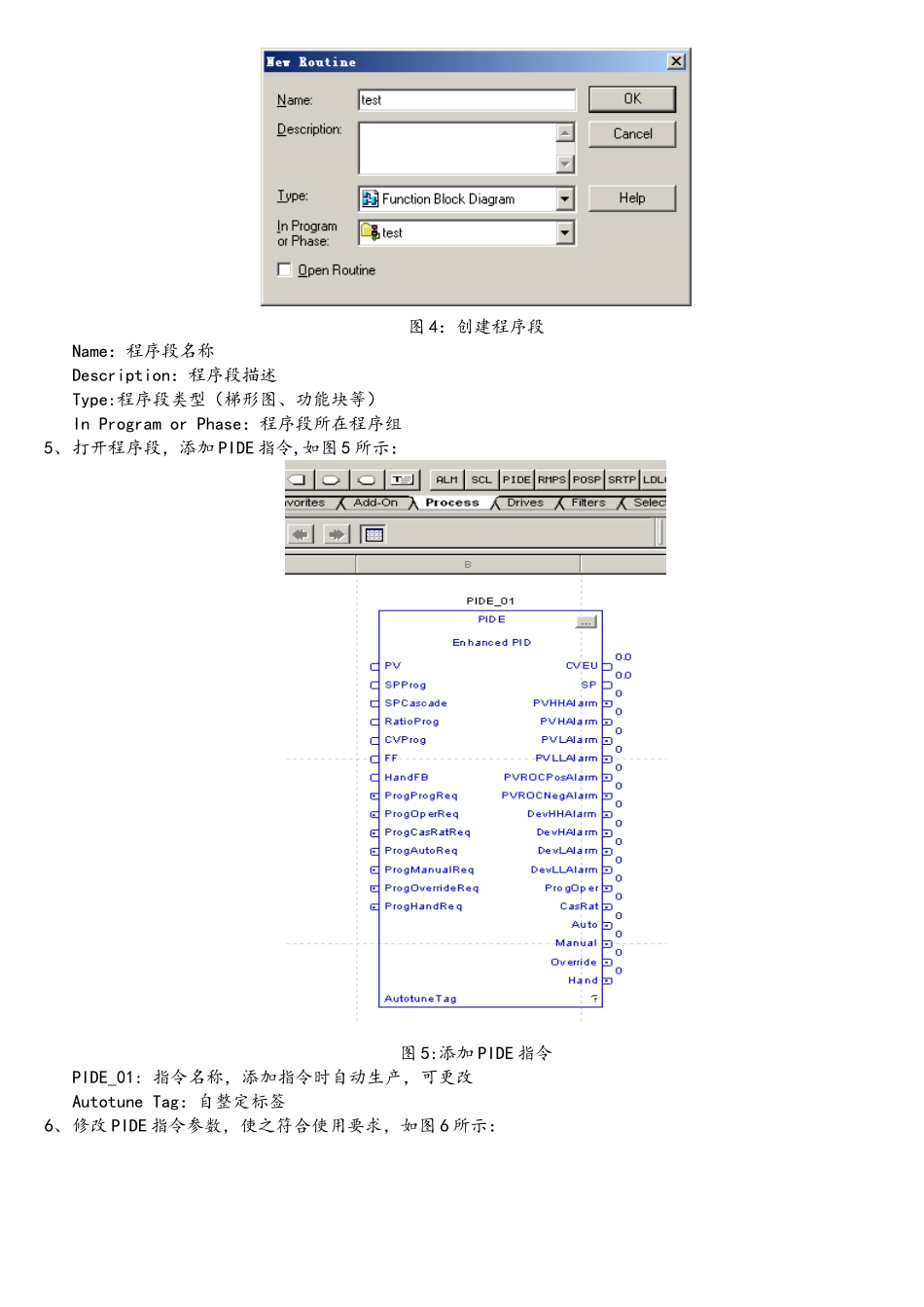
1、创建一个工程,如图 1 所示:图 1:创建工程Type:CPU 型号Revision:程序版本号Name:工程名字Description:工程描述Chassis Type:机架类型Slot:CPU 所在机架槽号(机架槽号编号从 0 开始)Create In:工程保存位置2、创建一周期性任务,如图 2 所示:图 2:创建周期性任务Name:周期性任务名称Description:周期性任务描述Type: 任务类型(周期性/时间)Period:任务周期时间Priority:优先级(数值越小,优先级越高)Watchdog:看门狗时间(任务周期时间的 2~3 倍)3、 创建程序组,如图 3 所示:图 3:创建程序组Name:程序组名称Description:程序组描述Schedule in:程序组所在任务4、 创建程序段图 4:创建程序段Name:程序段名称Description:程序段描述Type:程序段类型(梯形图、功能块等)In Program or Phase:程序段所在程序组5、打开程序段,添加 PIDE 指令,如图 5 所示:图 5:添加 PIDE 指令PIDE_01: 指令名称,添加指令时自动生产,可更改Autotune Tag:自整定标签6、修改 PIDE 指令参数,