根据转子磁链定向的矢量控制系统仿真1
矢量控制技术概述异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统,其控制十分复杂
矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的
将异步电动机的异步电动定子电流矢量分解为产生磁场的电流重量 (励磁电流) 和产生转矩的电流重量 (转矩电流) 分别加以控制,并同时控制两重量间的幅值和相位,即控制定子电流矢量,所以称这种控制方式称为矢量控制方式
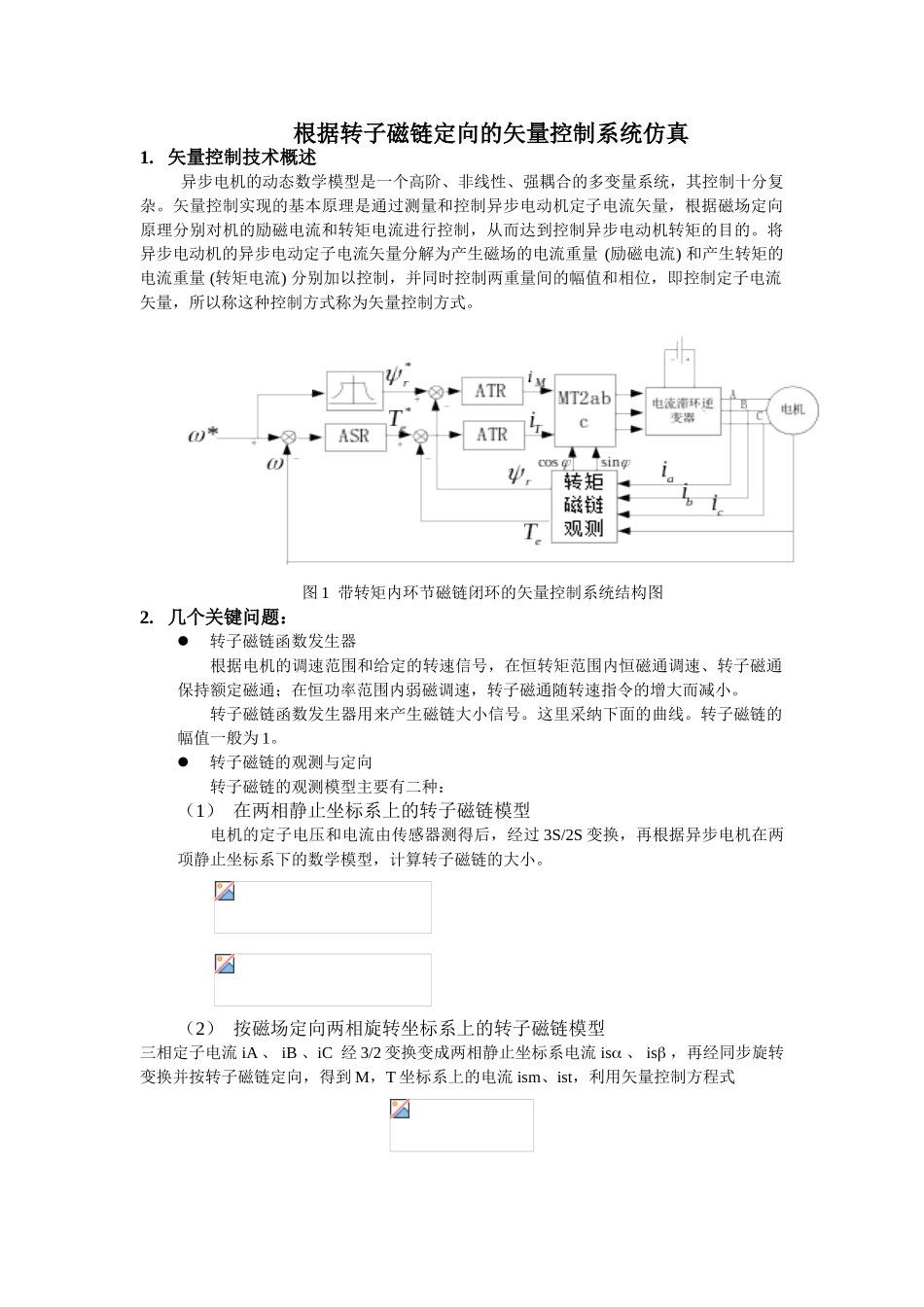
图 1 带转矩内环节磁链闭环的矢量控制系统结构图2
几个关键问题:转子磁链函数发生器根据电机的调速范围和给定的转速信号,在恒转矩范围内恒磁通调速、转子磁通保持额定磁通;在恒功率范围内弱磁调速,转子磁通随转速指令的增大而减小
转子磁链函数发生器用来产生磁链大小信号
这里采纳下面的曲线
转子磁链的幅值一般为 1
转子磁链的观测与定向转子磁链的观测模型主要有二种:(1) 在两相静止坐标系上的转子磁链模型电机的定子电压和电流由传感器测得后,经过 3S/2S 变换,再根据异步电机在两项静止坐标系下的数学模型,计算转子磁链的大小
(2) 按磁场定向两相旋转坐标系上的转子磁链模型 三相定子电流 iA 、 iB 、iC 经 3/2 变换变成两相静止坐标系电流 is 、 is ,再经同步旋转变换并按转子磁链定向,得到 M,T 坐标系上的电流 ism、ist,利用矢量控制方程式可以获得 r 和 s 信号,由s 与实测转速 相加得到定子频率信号1,再经积分即为转子磁链的相位角 ,它也就是同步旋转变换的旋转相位角
电磁转矩的观测根据异步电机在不同坐标系下的模型,可以得到多种电磁转矩的表达形式,由这些表达形式可以得到转矩观测器的表达:3
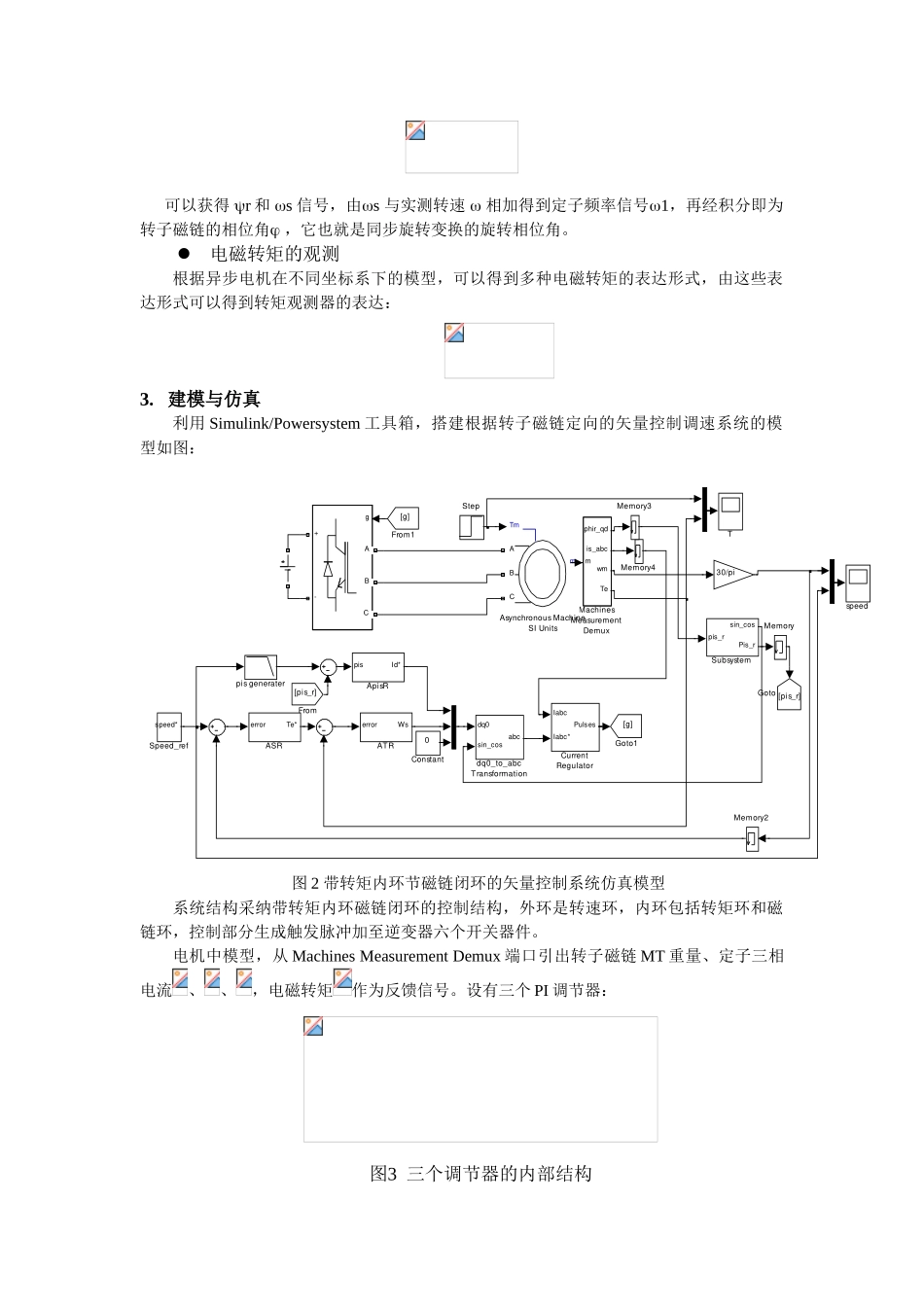
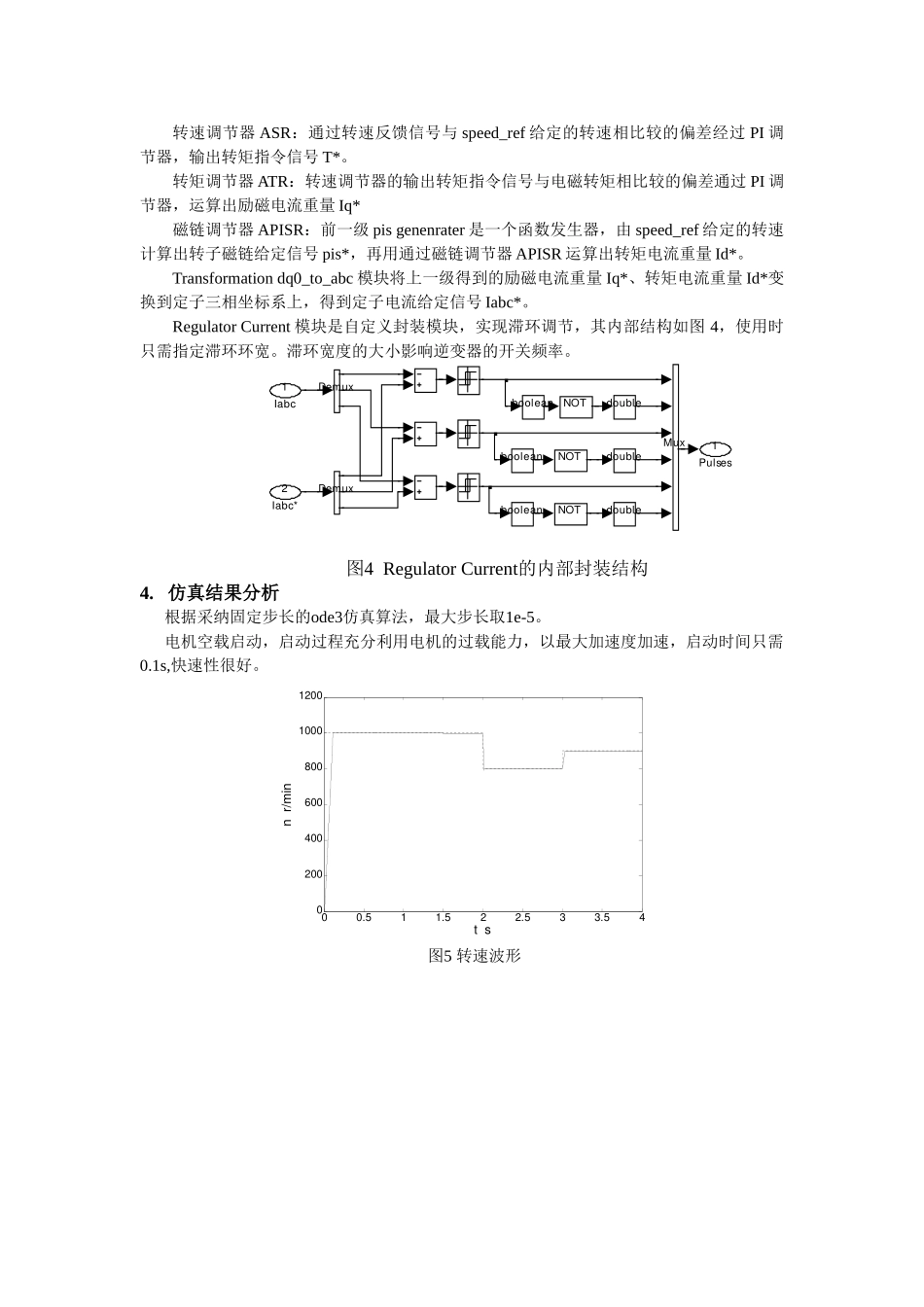
建模与仿真利用 Simulink/Powersy