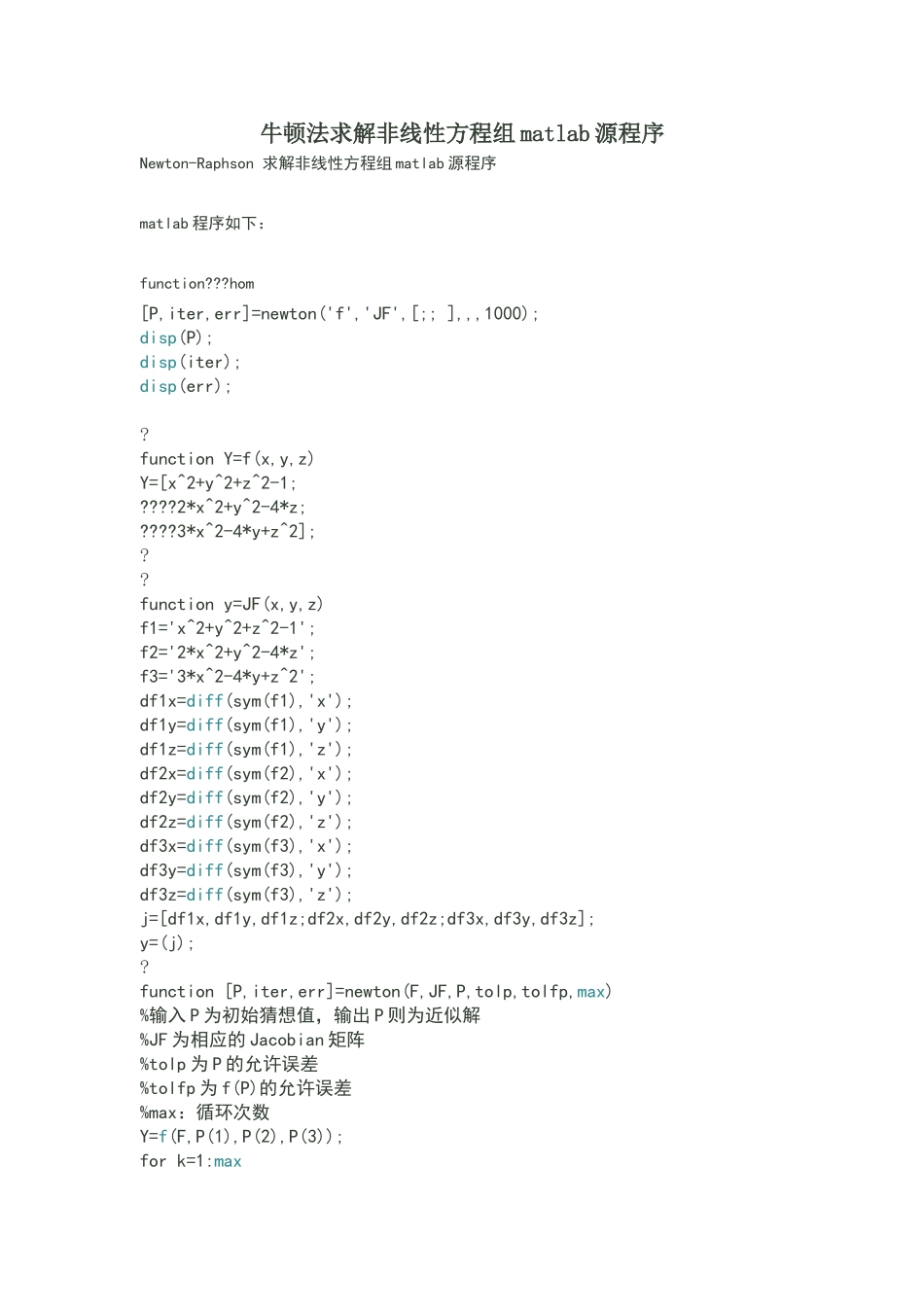
牛顿法求解非线性方程组 matlab 源程序Newton-Raphson 求解非线性方程组 matlab 源程序matlab 程序如下:function
hom[P,iter,err]=newton('f','JF',[;; ],,,1000);disp(P);disp(iter);disp(err);
function Y=f(x,y,z)Y=[x^2+y^2+z^2-1;
2*x^2+y^2-4*z;
3*x^2-4*y+z^2];
function y=JF(x,y,z)f1='x^2+y^2+z^2-1';f2='2*x^2+y^2-4*z';f3='3*x^2-4*y+z^2';df1x=diff(sym(f1),'x');df1y=diff(sym(f1),'y');df1z=diff(sym(f1),'z');df2x=diff(sym(f2),'x');df2y=diff(sym(f2),'y');df2z=diff(sym(f2),'z');df3x=diff(sym(f3),'x');df3y=diff(sym(f3),'y');df3z=diff(sym(f3),'z');j=[df1x,df1y,df1z;df2x,df2y,df2z;df3x,df3y,df3z];y=(j);
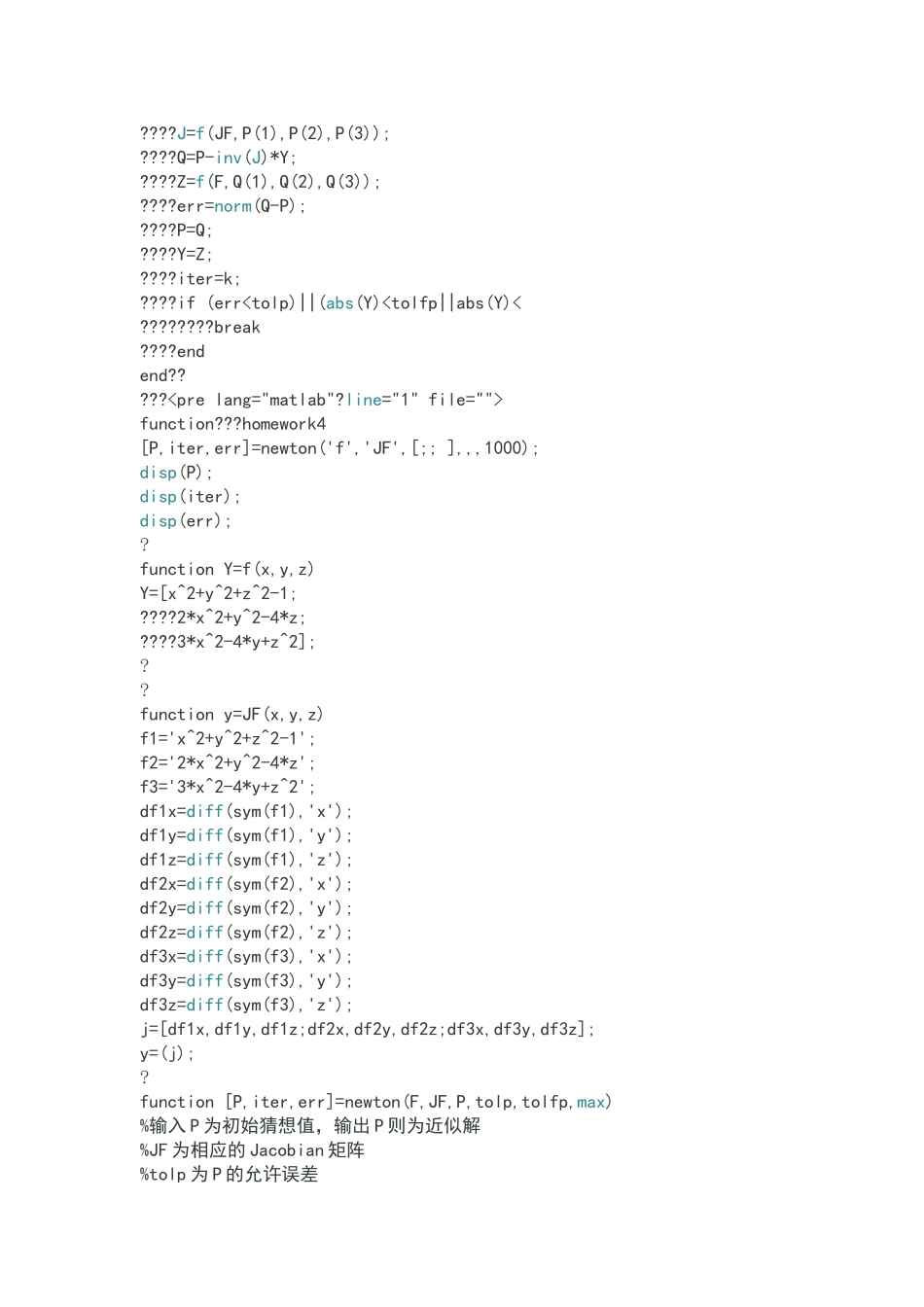
function [P,iter,err]=newton(F,JF,P,tolp,tolfp,max)%输入 P 为初始猜想值,输出 P 则为近似解%JF 为相应的 Jacobian 矩阵%tolp 为 P 的允许误差%tolfp 为 f(P)的允许误差%max:循环次数Y=f(F,P(1),P(2),P(3));for k=1:max
J=f(JF,P(1),P(2),P(3));
Q=P-inv(J)*Y;
Z=f(F,Q(1),Q(