LQR 算法控制磁流变智能隔震系统的数值模拟与试验讨论摘要:橡胶垫隔震结构在遭遇大的罕遇地震时,由于隔震层的位移过大,将引起隔震层的破坏;在加入常规被动阻尼器后,隔震层位移得到减小,但在中震和小震时,由于上部结构层间位移和加速度将要放大,这个过大的绝对加速度将使结构内部的物品遭到破坏
针对于此,本文将磁流变(MR)阻尼器与普通橡胶隔震支座相结合,采纳 LQR 经典线性最优控制算法和两种连续、开关控制方式对结构进行振动控制
数值模拟分析与振动台试验结果表明:由 MR 阻尼器提供可调阻尼力的智能隔震控制系统,能有效克服被动隔震最优控制频带窄的缺点,对较宽频域范围不同大小的地震激励均能提供最优控制,且连续调节控制要优于开关调节控制
试验结果也表明该控制算法是一种能用于结构实际控制的变阻尼有效算法
关键词:智能隔震系统; 磁流变阻尼器 ;数值计算 ; 振动台试验1.引言 磁流变阻尼器是一种性能优良的变阻尼控制器,它具有阻尼力可调范围宽、响应迅速且所需能量很少的特点[1-3]
目前在结构半主动控制中得到广泛讨论
本文将把 MR 阻尼器与普通橡胶隔震支座联合组成智能隔震系统,采纳简单可靠的 LQR 线性最优算法对结构进行振动控制,并应用了连续调节与开关调节两种控制方式
通过对不同场地和地震力大小的地震波的数值模拟分析和振动台试验讨论表明,这种控制系统对不同大小的宽频域地震动都能提供最优的控制,并且连续调节的控制方式要优于开关调节
2. 智能基础隔震系统简介 该智能隔震系统由 MR 阻尼器与普通夹层橡胶支座组成,橡胶支座提供恢复力,MR阻尼器通过电压控制提供可变的阻尼力
试验使用的磁流变阻尼器是由哈尔滨工业大学关新春等人自行研制开发的
其参数为最大出力 2 t,最小出力 0
25 t,即阻尼力可调倍数是8
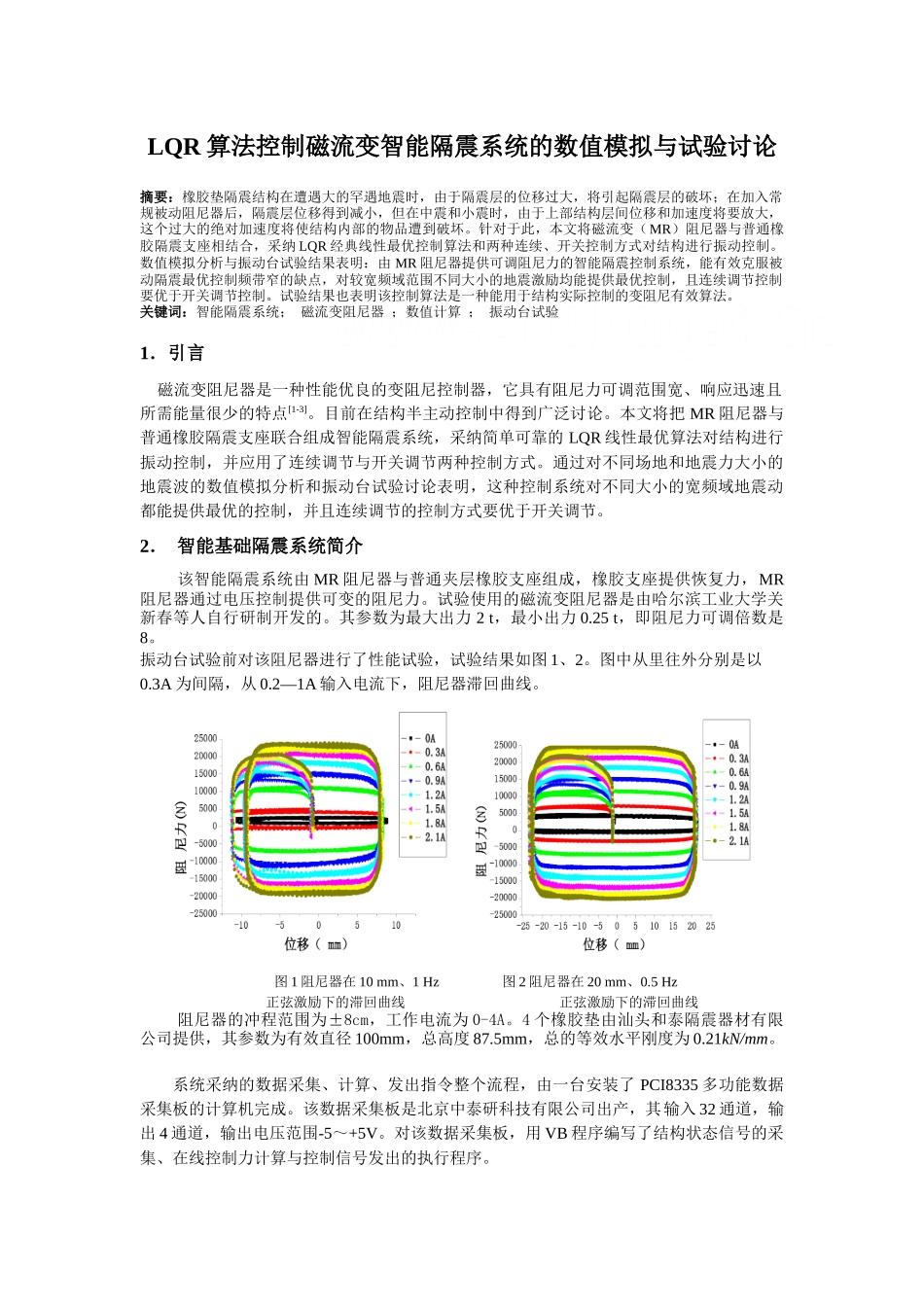
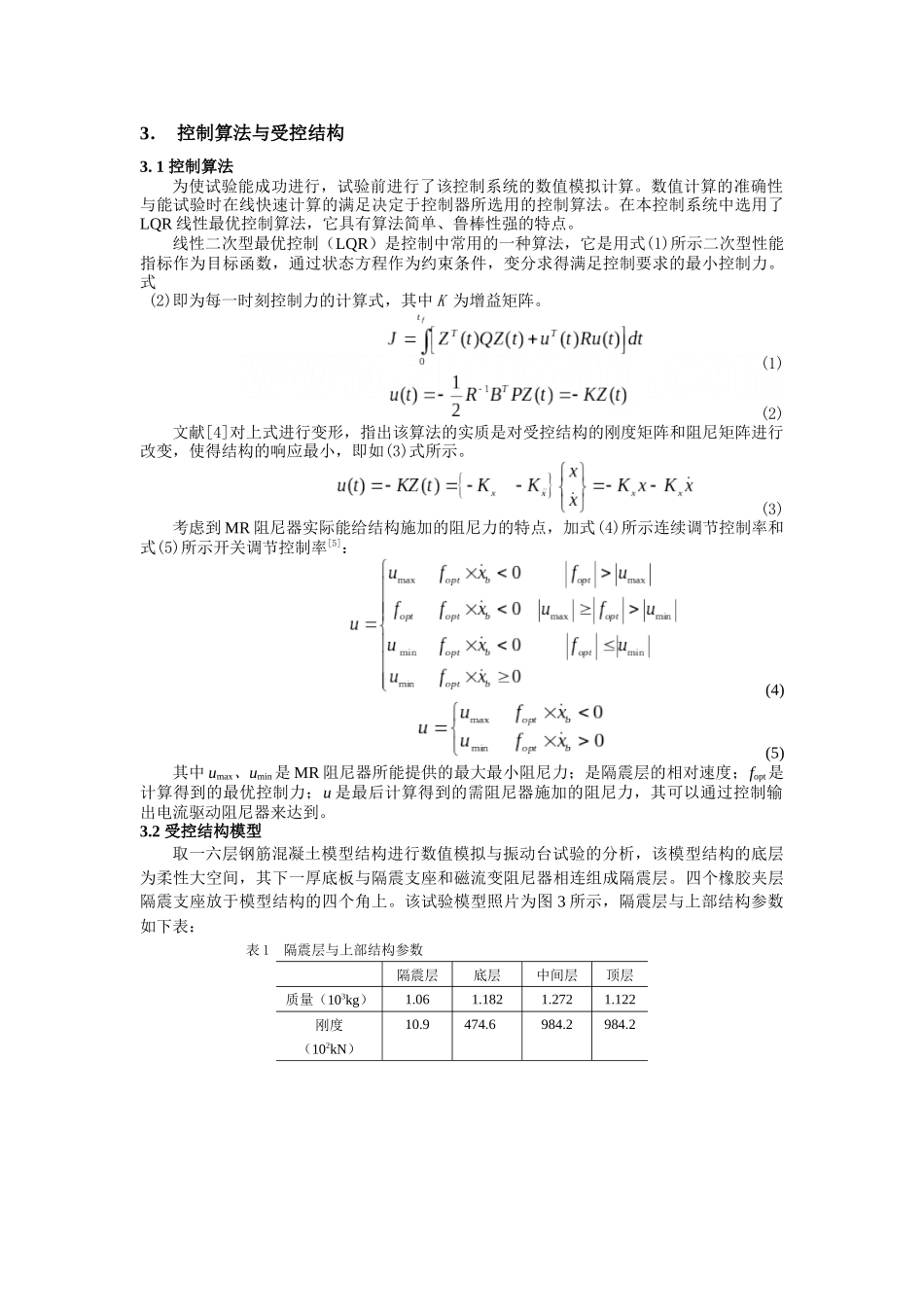
振动台试验前对该阻尼器进行了性能试验,试验结果如图 1、2
图中从里往外分别是以0