2017河北2017河北 中考考点 系统复习中考考向 题组强化2017河北2017河北2017河北2017河北 中考实验 满分方案第 14 讲 简单机械2017 年河北中考考点2017 年河北中考考点考 点2 考 点1 杠杆滑轮及滑轮组考 点3 斜面与轮轴返回2017 年河北中考考向2017 年河北中考考向返回简单机械的特点及应用考向 1考向 2特殊方向的滑轮及滑轮组杠杆平衡条件的应用考向 3实验探究杠杆的平衡条件2017 年河北中考实验2017 年河北中考实验返回 考点 1 杠杆1 .杠杆的五要素和平衡条件定义一根硬棒,在力的作用下,能绕固定点 O 转动,则这根硬棒就是杠杆 ( 理想模型法 )五要素支点如图所示,杠杆绕着转动的点,用字母 O 表示动力如图所示,使杠杆转动的力,用字母 F1 表示阻力如图所示,阻碍杠杆转动的力,用字母 F2 来表示动力臂 如图所示,从支点到动力作用线的距离,用字母l1 表示阻力臂 如图所示,从支点到阻力作用线的距离,用字母l2 表示易错点拨画力臂的方法: (1) 先在杠杆示意图上确定出支点;(2) 画出动力作用线和阻力作用线; (3) 最后从支点向力的作用线引垂线
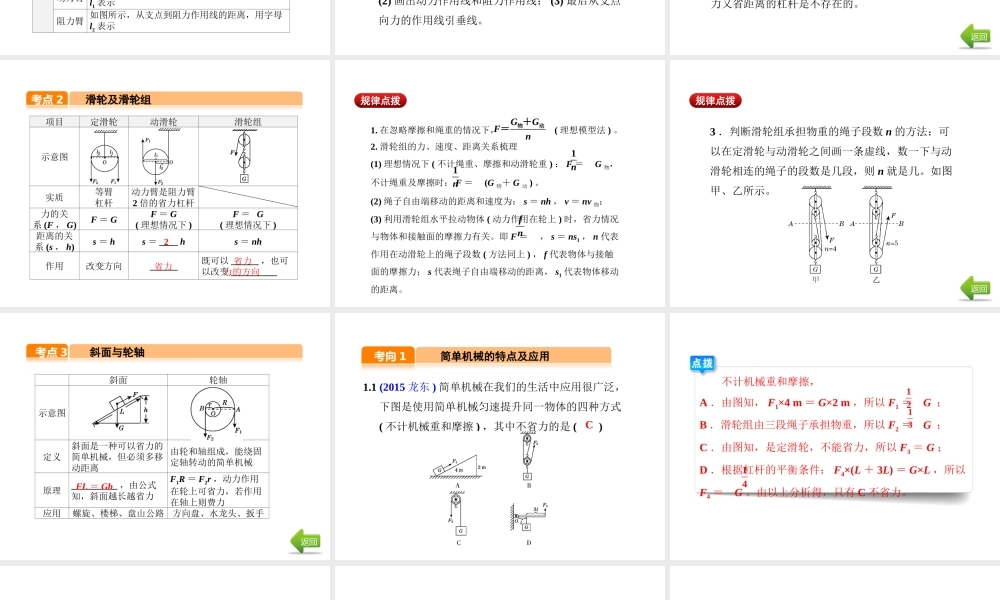
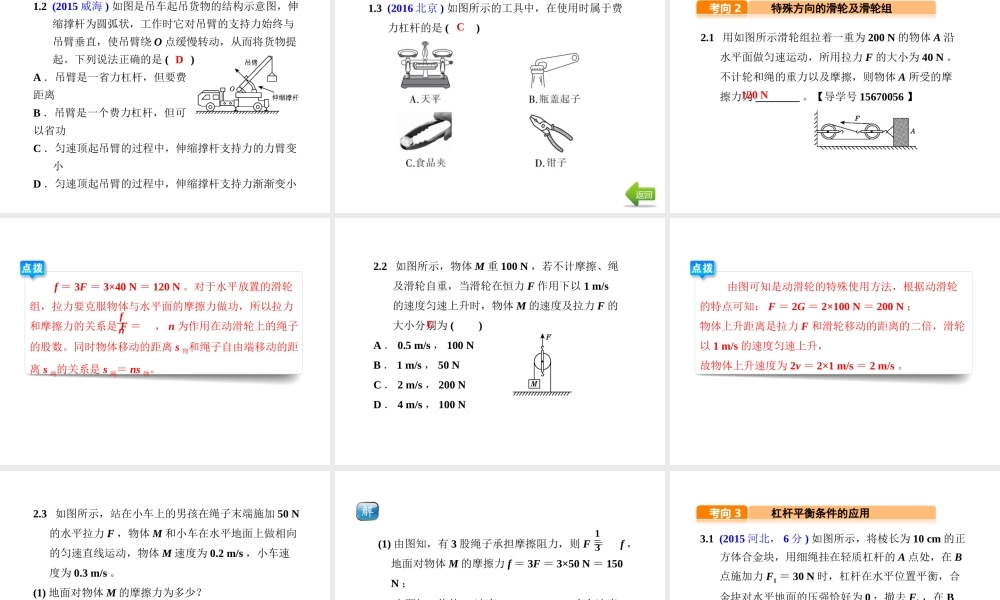
探究杠杆平衡条件探究过程实验前调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,目的是消除杠杆自身重力对实验的影响,实验中使杠杆在水平位置平衡,目的是方便从杠杆上直接读出力臂结论动力 × 动力臂=阻力 × 阻力臂即 F1l1 = F2l2说明为了消除实验中错误的结论:动力 × 支点到动力作用点的距离=阻力 × 支点到阻力作用点的距离,可用弹簧测力计代替一侧钩码斜拉杠杆2 .杠杆的分类说明省力杠杆必然费距离,费力杠杆必然省距离,既省力又省距离的杠杆是不存在的
返回力臂关系力的关系特点实例省力杠杆l1____l2F1 < F2省力,____ 距离羊角锤、起子、撬棒等费力杠杆l1____l2