第1页共9页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共9页智能驾驶车辆电控执行平台会议纪要2009年4月11日,吉林大学汽车动态模拟国家重点实验室,智能驾驶车辆电控执行平台专题会讨论如下:1、项目目标1
5亿,智能未来车辆挑战杯大赛
支持到2015年
西安交通大学校长郑老师,中国自然基金成就奖获得者打造新一轮吉林大学汽车学科无人驾驶车
汽车控制策略和评价为主体,机电一体化,信息集成等找专业公司合作
学生重点放在汽车学科,无人驾驶车辆策略,定义
希望合作马上开展
管院长指导,高老师负责,贾鑫组长
6月5日参加比赛,5月20日集成完成,到西安
1,执行机构做完
油门,制动,转向,变速箱
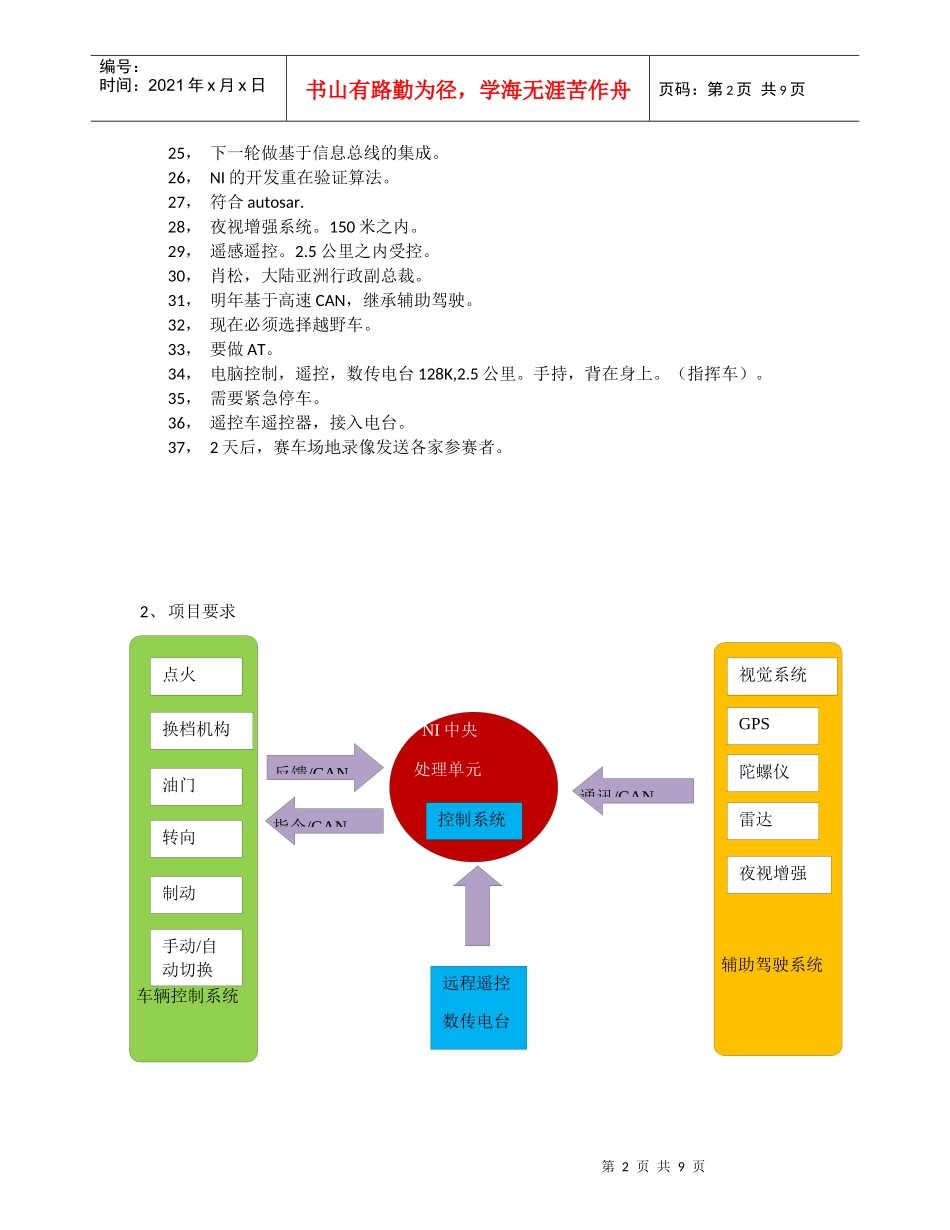
2,信息采集部分
激光雷达,车载平台
陀螺,GPS,视觉
3,中央处理单元,NI,PCI架构执行
之后,作MotoTron
4,哪怕展示局部性
局部算法的魅力
5,国防科大,南理工,清华,北理工
目前所有都不敢参与
理由:1,军工项目2,目前车没有完整可演示
6,展示执行机构,处理算法等,车上打图标,到地方作技术交流
意大利帕尔玛车
7,4500,480,车
8,其他传感部分系统集成
9,演示车到线,SCC,雷达车到线提示
10,高速性能辅助驾驶的研究
11,设置各路执行机构的动态响应,时间,控制增益稳定性
12,采购东西成本透明,意昂的劳务
13,Drivemodel的魅力
发展历程印刷展板
局部展示学术进展
14,展示基于远程雷达的识别,和我们驾驶员模型预测能力
15,把概念提出来,展示整体优势
16,其他学校做法:决策部分非理性化,仲裁机制
17,图形识别形成可信区域
安全性,轻便型,合法性
18,执行机构
19,NI系统的集成
20,对车的动力学理解,有好的算法
我们的控制器与车载的动力系统