智能机器人跨专业公选实验实验指导书范守文吴献钢袁太文陈畅电子科技大学机械电子工程学院2005年9月机器人自己做,也许你从小有这样的一个梦,在这里,我们让你梦想成真
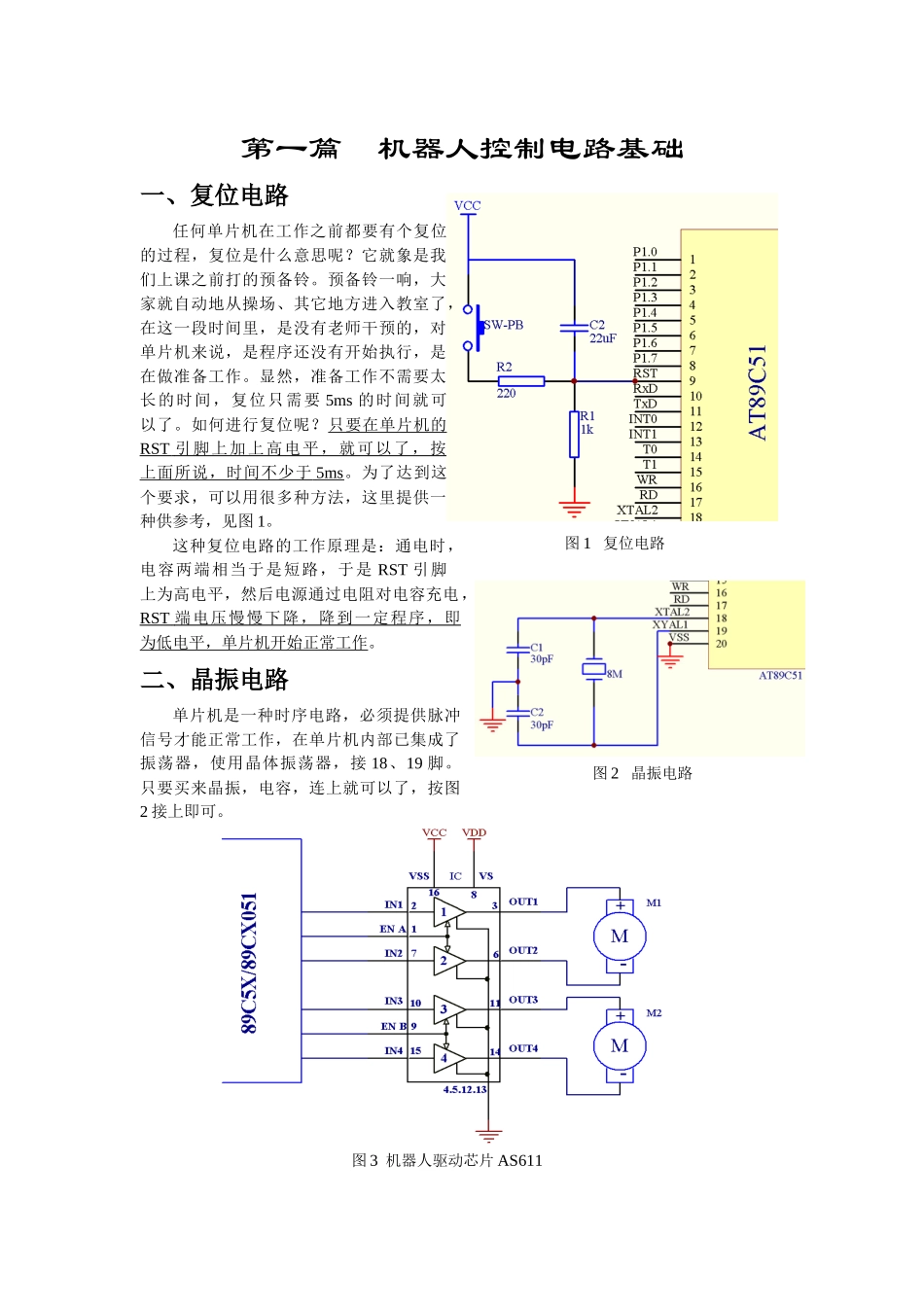
图1复位电路图2晶振电路图3机器人驱动芯片AS611第一篇机器人控制电路基础一、复位电路任何单片机在工作之前都要有个复位的过程,复位是什么意思呢
它就象是我们上课之前打的预备铃
预备铃一响,大家就自动地从操场、其它地方进入教室了,在这一段时间里,是没有老师干预的,对单片机来说,是程序还没有开始执行,是在做准备工作
显然,准备工作不需要太长的时间,复位只需要5ms的时间就可以了
如何进行复位呢
只要在单片机的RST引脚上加上高电平,就可以了,按上面所说,时间不少于5ms
为了达到这个要求,可以用很多种方法,这里提供一种供参考,见图1
这种复位电路的工作原理是:通电时,电容两端相当于是短路,于是RST引脚上为高电平,然后电源通过电阻对电容充电,RST端电压慢慢下降,降到一定程序,即为低电平,单片机开始正常工作
二、晶振电路单片机是一种时序电路,必须提供脉冲信号才能正常工作,在单片机内部已集成了振荡器,使用晶体振荡器,接18、19脚
只要买来晶振,电容,连上就可以了,按图2接上即可
图474LS21四输入与门引脚图图5LM324四运放的组成与引脚图三、机器人驱动芯片AS611图3是机器人驱动芯片AS611与51单片机连接的电路原理图AS611内部包含4通道逻辑驱动电路,其额定工作电流为1A,最大可达1
5A,Vss电压最小4
5V,最大可达36V;Vs电压最大值也是36V
下表是其使能、输入引脚和输出引脚的逻辑关系(电路按图3连接):ENA(B)IN1(IN3)IN2(IN4)电机运行情况HHL正转HLH反转H同IN2(IN4)同IN1(IN3)快速停止LXX停止四、74LS21四输入与门74LS21四输入与门引脚如图