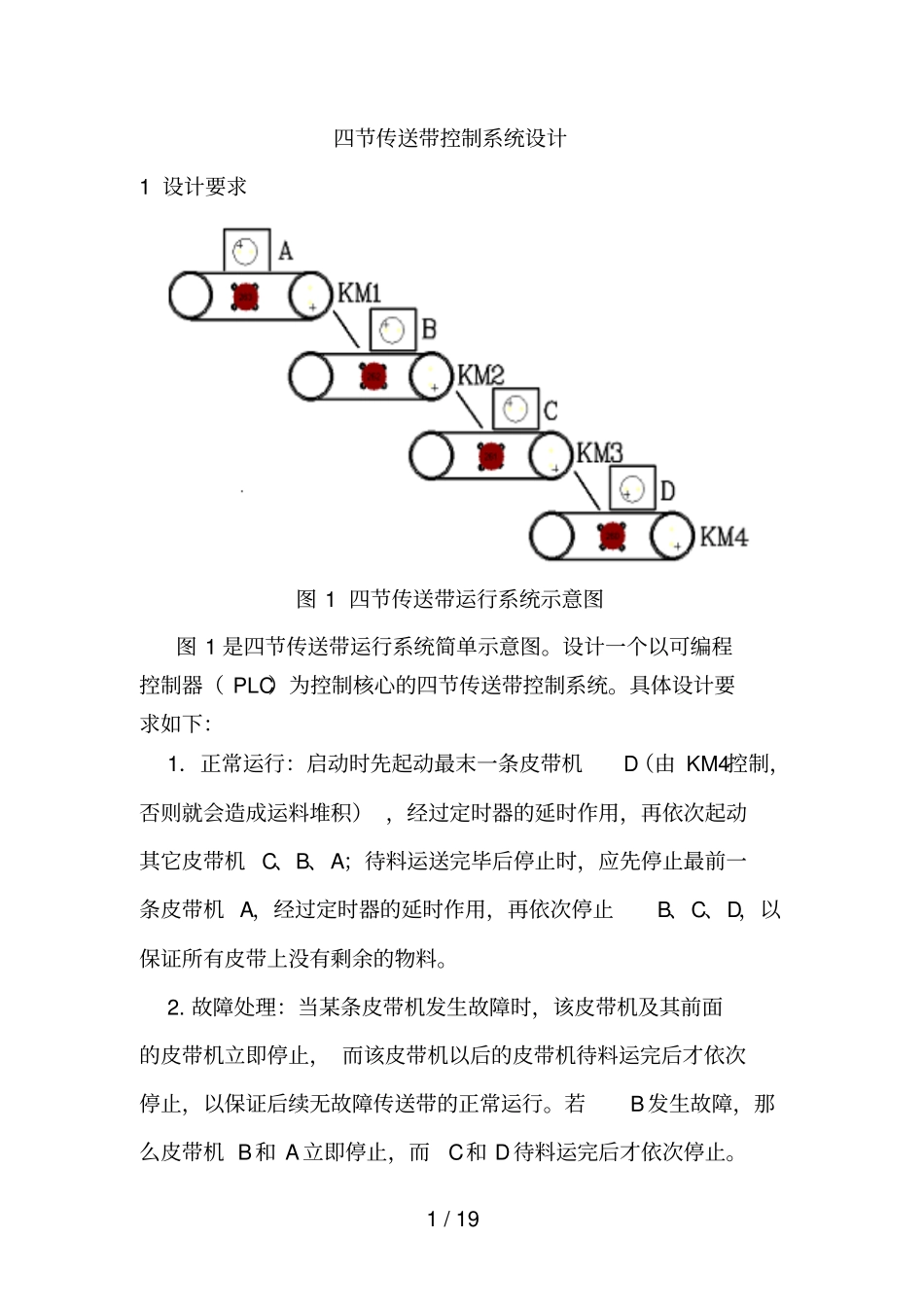
1/19咸阳师范学院物理与电子工程学院课程设计报告题目:四节传送带控制系统设计班级:姓名:学号:指导教师:成绩:完成日期:2014年12月2/19目录1设计要求--------------------------------22控制系统总体设计--------------------33控制系统硬件设计-----------------------------94控制系统硬件设计----------------------115实验----------------------------------126心得体会----------------------------------121/19四节传送带控制系统设计1设计要求图1四节传送带运行系统示意图图1是四节传送带运行系统简单示意图
设计一个以可编程控制器(PLC)为控制核心的四节传送带控制系统
具体设计要求如下:1.正常运行:启动时先起动最末一条皮带机D(由KM4控制,否则就会造成运料堆积),经过定时器的延时作用,再依次起动其它皮带机C、B、A;待料运送完毕后停止时,应先停止最前一条皮带机A,经过定时器的延时作用,再依次停止B、C、D,以保证所有皮带上没有剩余的物料
故障处理:当某条皮带机发生故障时,该皮带机及其前面的皮带机立即停止,而该皮带机以后的皮带机待料运完后才依次停止,以保证后续无故障传送带的正常运行
若B发生故障,那么皮带机B和A立即停止,而C和D待料运完后才依次停止
2/192控制系统总体设计控制系统的结构框图如图2所示,主要包括控制开关、PLC和电动机三个主要部分
控制开关与PLC的输入端子相连接,主要给PLC提供输入控制信号
电动机与PLC的输出端子相连接,显示PLC控制结果以控制传送带的运行状况
控制开关由启动和停止两个按钮组成,电动机停转或运行可以用发光二极管模拟
启动、停止用动合按钮来实现,负载