第1章:NXT软件和硬件概述本章将介绍以下内容:●蓝牙机器人硬件系统●蓝牙机器人软件系统●给蓝牙机器人编写一个最简单的程序1
1蓝牙机器人系统1
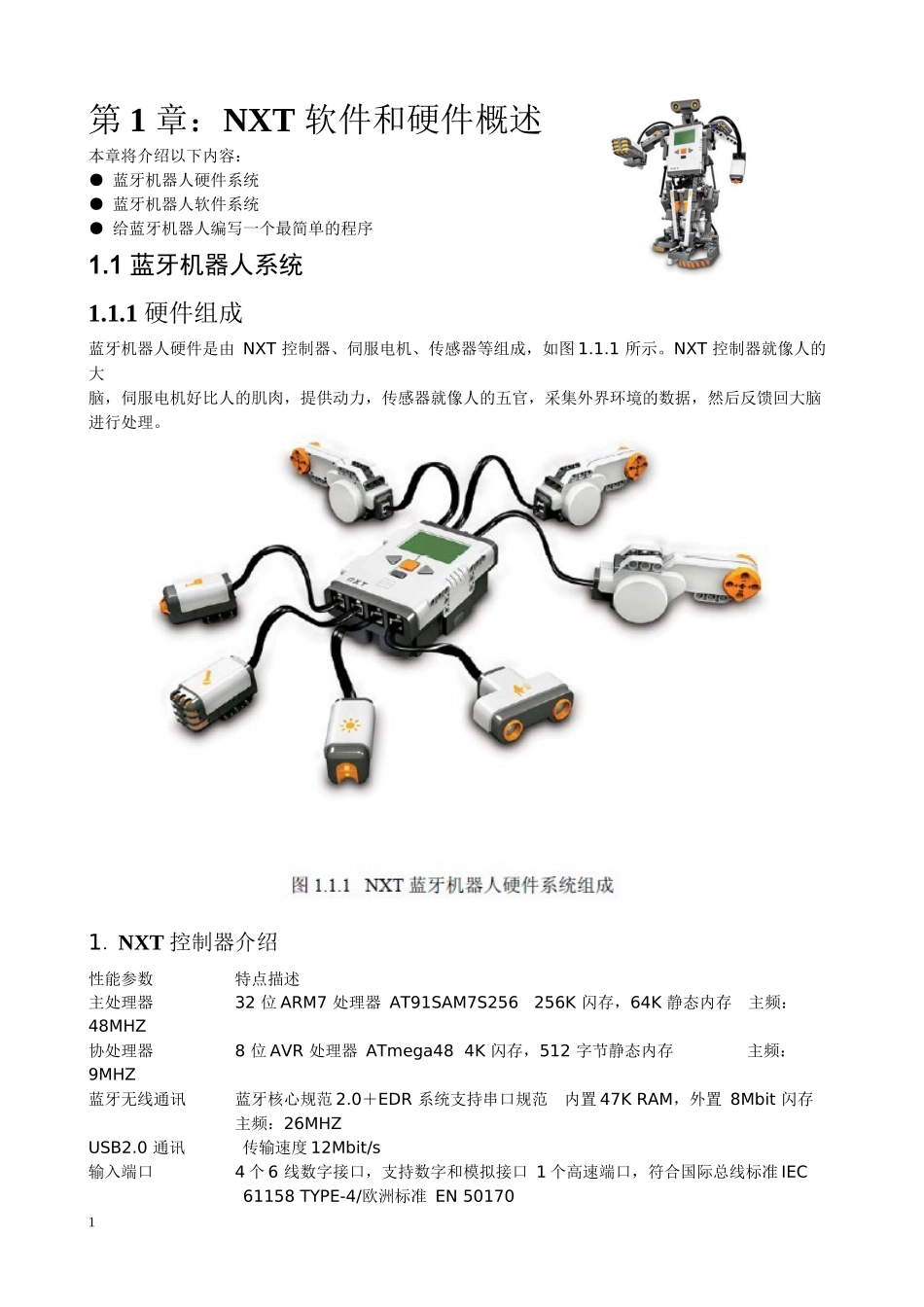
1硬件组成蓝牙机器人硬件是由NXT控制器、伺服电机、传感器等组成,如图1
NXT控制器就像人的大脑,伺服电机好比人的肌肉,提供动力,传感器就像人的五官,采集外界环境的数据,然后反馈回大脑进行处理
1.NXT控制器介绍性能参数特点描述主处理器32位ARM7处理器AT91SAM7S256256K闪存,64K静态内存主频:48MHZ协处理器8位AVR处理器ATmega484K闪存,512字节静态内存主频:9MHZ蓝牙无线通讯蓝牙核心规范2
0+EDR系统支持串口规范内置47KRAM,外置8Mbit闪存主频:26MHZUSB2
0通讯传输速度12Mbit/s输入端口4个6线数字接口,支持数字和模拟接口1个高速端口,符合国际总线标准IEC61158TYPE-4/欧洲标准EN501701输出端口3个六线数字接口,支持解码器信号输入显示屏100x64象素黑白图像显示可视区域26mmx40
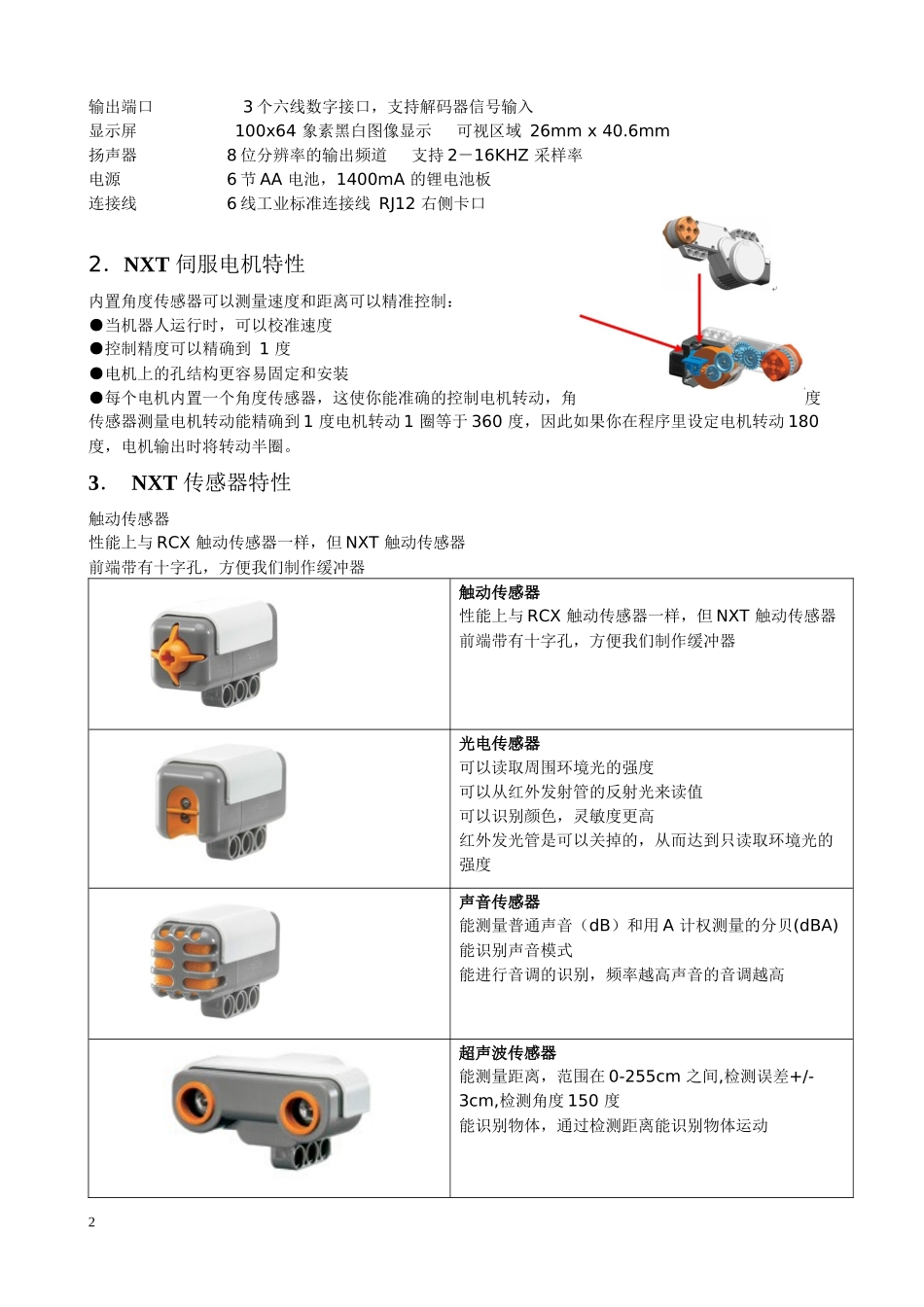
6mm扬声器8位分辨率的输出频道支持2-16KHZ采样率电源6节AA电池,1400mA的锂电池板连接线6线工业标准连接线RJ12右侧卡口2.NXT伺服电机特性内置角度传感器可以测量速度和距离可以精准控制:●当机器人运行时,可以校准速度●控制精度可以精确到1度●电机上的孔结构更容易固定和安装●每个电机内置一个角度传感器,这使你能准确的控制电机转动,角度传感器测量电机转动能精确到1度电机转动1圈等于360度,因此如果你在程序里设定电机转动180度,电机输出时将转动半圈
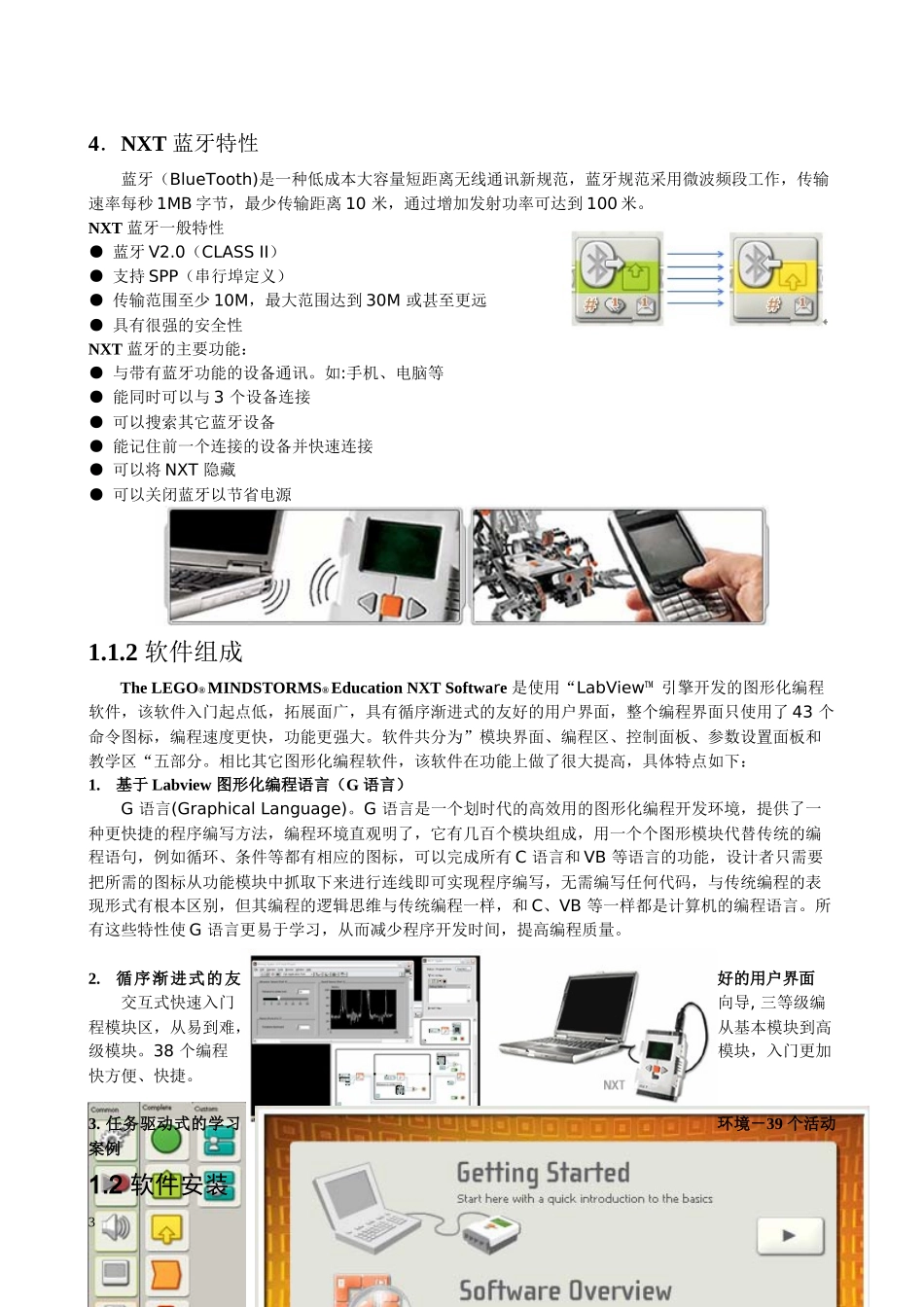
3.NXT传感器特性触动传感器性能上与RCX触动传感器一样,但NXT触动传感器前端带有十字孔,方便我们制作缓冲器触动传感器性能上与RCX触动传感器一样,但NXT触动传感器前端带有十字