异步电机的矢量控制设计及仿真前言异步电机的矢量控制设计及仿真在矢量控制技术出现之前,交流调速系统多为V/f比值恒定控制方法,又常称为标量控制
采用这种方法在低速及动态(如加减速)、加减负载等情况时,系统表现出明显的缺陷,所以交流调速系统的稳定性、启动、低速时的转矩动态相应都不如直流调速系统
随着电力电子技术的发展,交流异步电机控制技术全面从标量控制转向了矢量控制,采用矢量控制的交流电机完全可以和直流电机的控制效果相媲美,甚至超过直流调速系统
矢量变换控制(以下简称VC)技术的诞生和发展为现代交流调速技术的发展提供了理论基础
交流电动机是一个多变量、非线性、强耦合的被控对象,采用了参数重构和状态重构的现代控制理论概念可以实现交流电动机定子电流的励磁分量和转矩分量之间的解耦,实现了将交流电动机的控制过程等效为直流电动机的控制过程
这就使得交流调速系统的动态性能得到了显著的改善和提高,从而使交流调速最终取代直流调速系统成为可能
实践证明,采用矢量控制方法的交流调速系统的优越性高于直流调速系统
矢量控制原理的出现也促进了其它控制方法的产生,如多变量解耦控制等方法
七十年代初期,西门子公司的F
Blashke和W
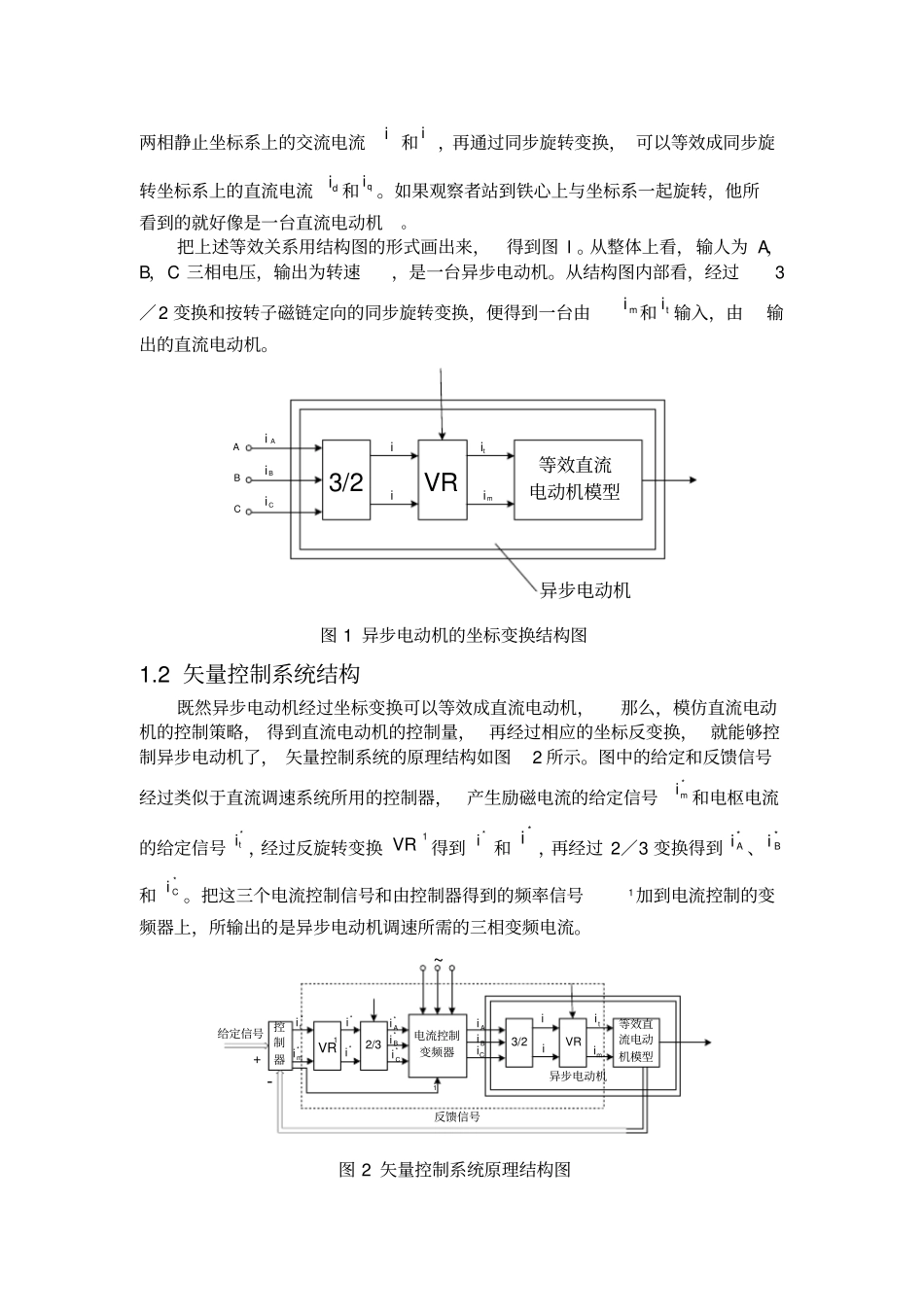
Flotor提出了“感应电机磁场定向的控制原理”,通过矢量旋转变换和转子磁场定向,将定子电流按转子磁链空间方向分解成为励磁分量和转矩分量,这样就可以达到对交流电机的磁链和电流分别控制的目的,得到了类似于直流电机的模型,然后模拟直流电机进行控制,可以获得良好的静、动态调速性能
本文分析异步电机的数学模型及矢量控制原理的基础上,利Matlab/Simulink中SimPowerSystems模块,采用模块化的思想分别建立了交流异步电机模块、矢量控制器模块、坐标变换模块、磁链调节器模块、速度调节模块,再进行功能模块的有机整合,构成了按转子磁场定向的异步电机矢量控制系统仿真模型