第1页共12页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共12页设计题目:汽车转向梯形机构的设计班级:机自xx姓名:xxx指导老师:xx2010年10月10日西安交通大学第2页共12页第1页共12页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2页共12页汽车转向梯形机构设计机自84班李亚敏08011098设计要求:(1)设计实现前轮转向梯形机构;(2)转向梯形机构在运动过程中有良好的传力性能
原始数据:车型:无菱兴旺,转向节跨距M:1022mm,前轮距D:1222mm,轴距L:1780mm,最小转弯半径R:4500mm
前言:汽车转向系统是用来改变或恢复其行驶方向的专设机构,由转向操纵机构、转向器和转向传动机构三部分组成
转向操纵机构主要由方向盘、转向轴、转向管柱等组成:转向器将方向盘的转动变为转向摇臂的摆动或齿条轴的往复运动,并对转向操纵力进行放大的机构:转向传动机构将转向器输出的力和运动传给车轮,并使左右车轮按一定关系进行偏转运动的机构
设计过程:一、设计原理简介1采用转向梯形机构转向的机动车辆,左右转弯时应具有相同的特征,因此左右摇臂是等长的
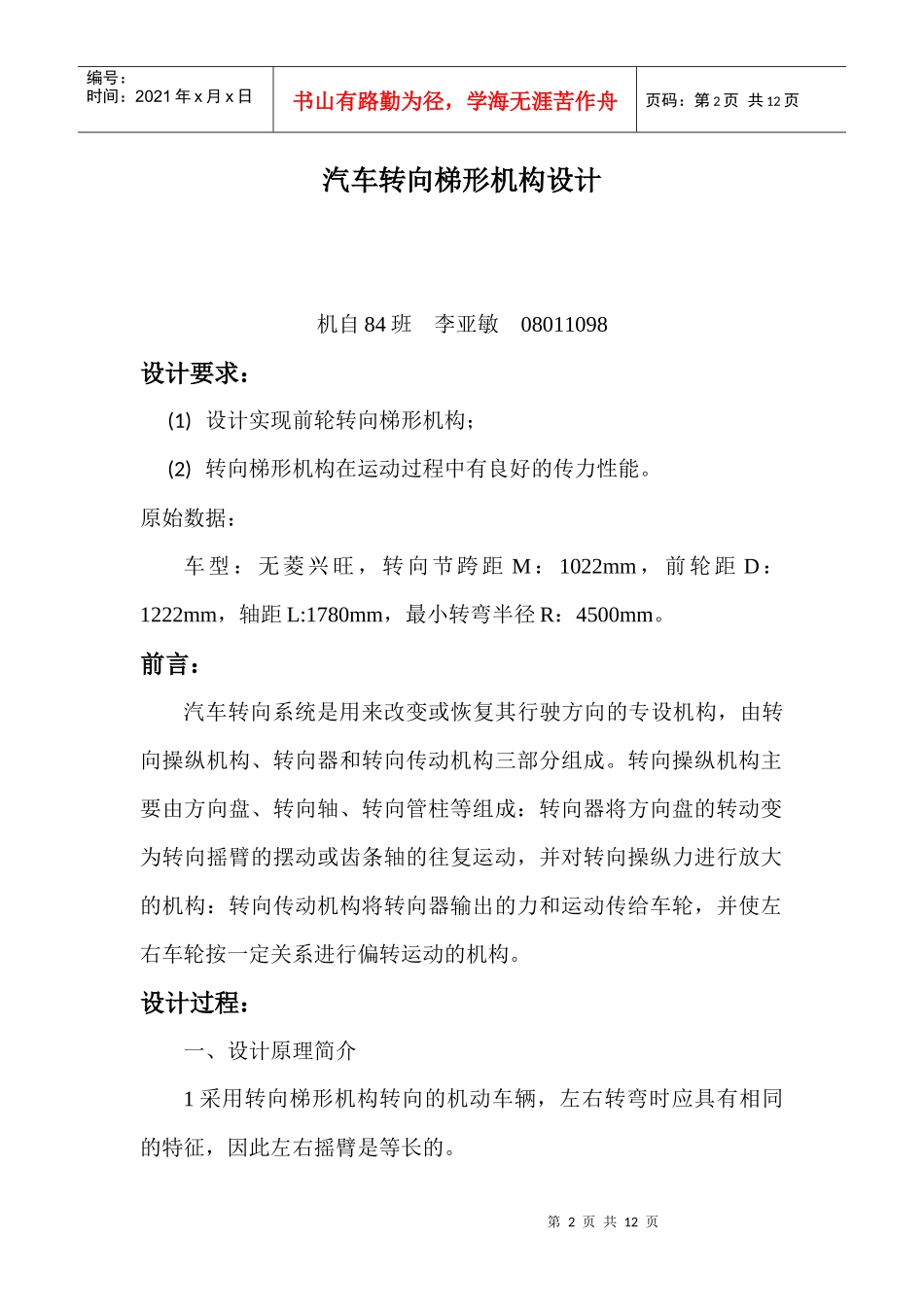
第3页共12页第2页共12页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第3页共12页2内外侧转向轮偏转角满足无侧滑条件时的关系式为:cotα−cotβ=ML(1)3
转向过程中转向梯形机构应满足的方程为cos(α+α0)=¿cos(β+β0)−aMcos(β+β0−α−α0)+¿2a2−b2+M22Ma¿¿(2)且b=M−2acosα0(3)代人整理得:cos(α+α0)=−¿cos(β−α0)+aMcos(β−α−2α0)+2cosα0−2cos2α0❑M+aM¿(4)式中αβ为无侧滑状态下梯形臂转角的对应位置,可视为已知
由(1)式算出来,因此,方