-可编辑修改-前馈控制系统前馈控制系统的基本原理前馈控制的基本概念是测取进入过程的干扰(包括外界干扰和设定值变化),并按其信号产生合适的控制作用去改变操纵变量,使受控变量维持在设定值上
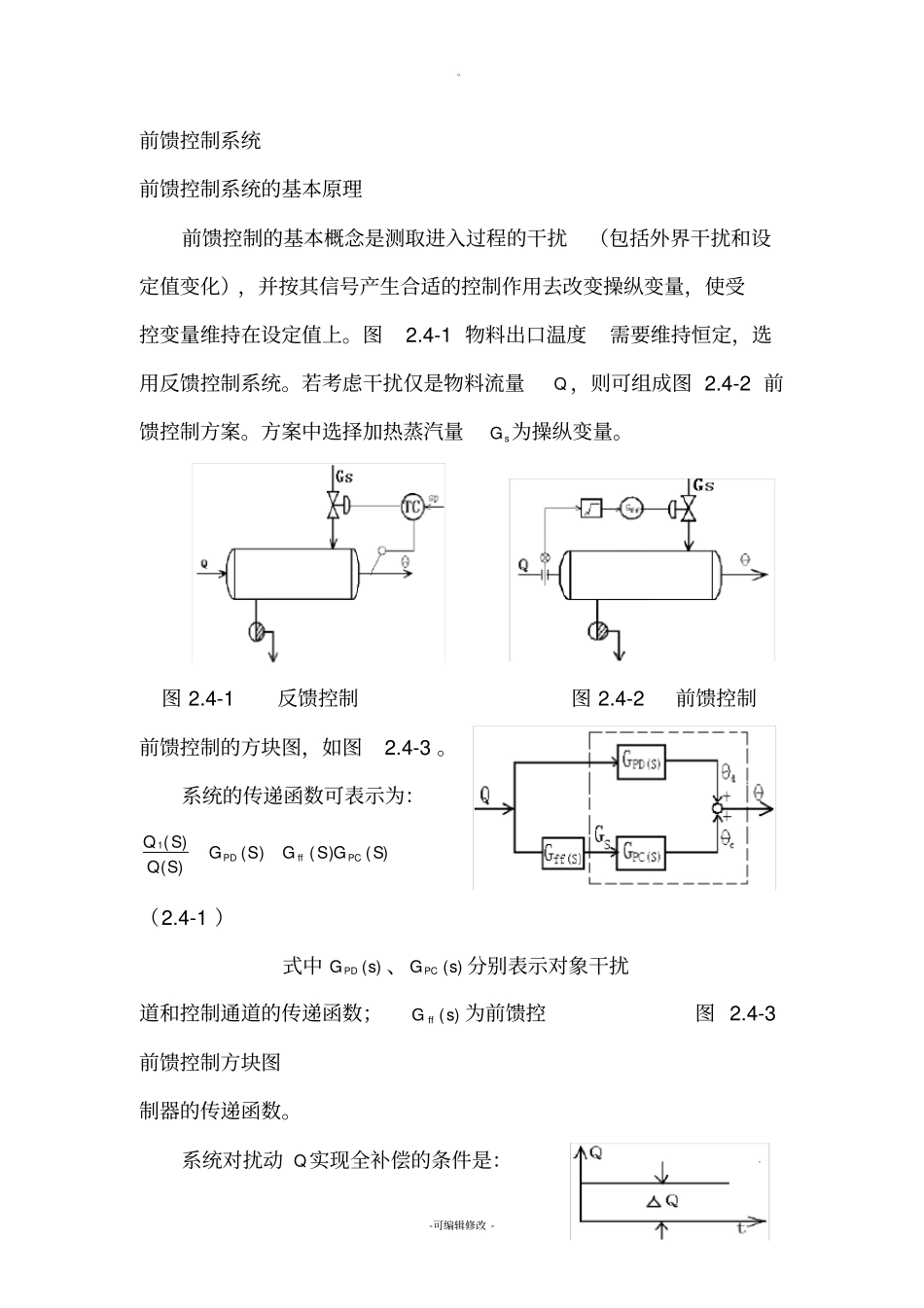
4-1物料出口温度需要维持恒定,选用反馈控制系统
若考虑干扰仅是物料流量Q,则可组成图2
4-2前馈控制方案
方案中选择加热蒸汽量sG为操纵变量
4-1反馈控制图2
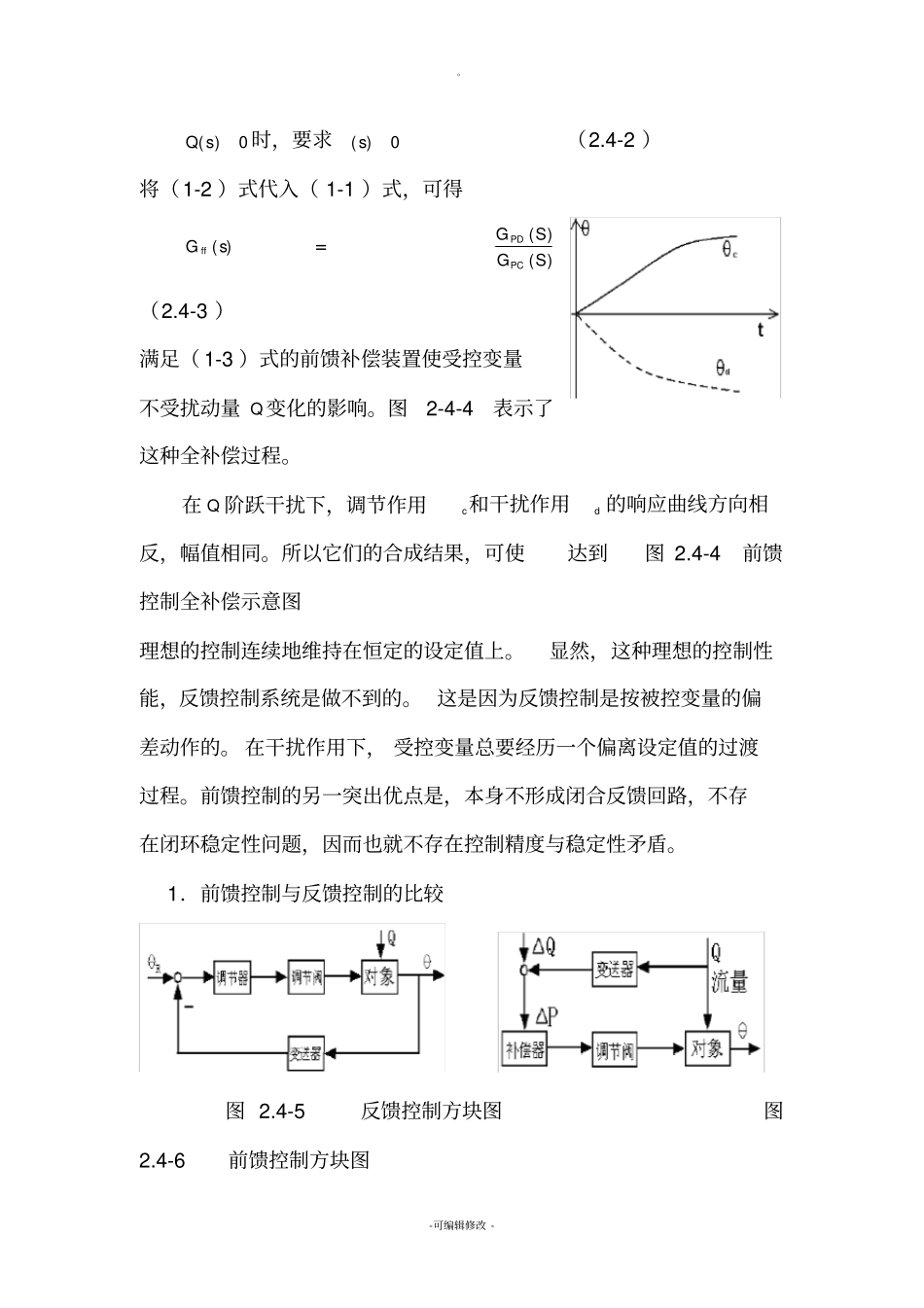
4-2前馈控制前馈控制的方块图,如图2
系统的传递函数可表示为:)()()()()(1SGSGSGSQSQPCffPD(2
4-1)式中)(sGPD、)(sGPC分别表示对象干扰道和控制通道的传递函数;)(sGff为前馈控图2
4-3前馈控制方块图制器的传递函数
系统对扰动Q实现全补偿的条件是:
-可编辑修改-0)(sQ时,要求0)(s(2
4-2)将(1-2)式代入(1-1)式,可得)(sGff=)()(SGSGPCPD(2
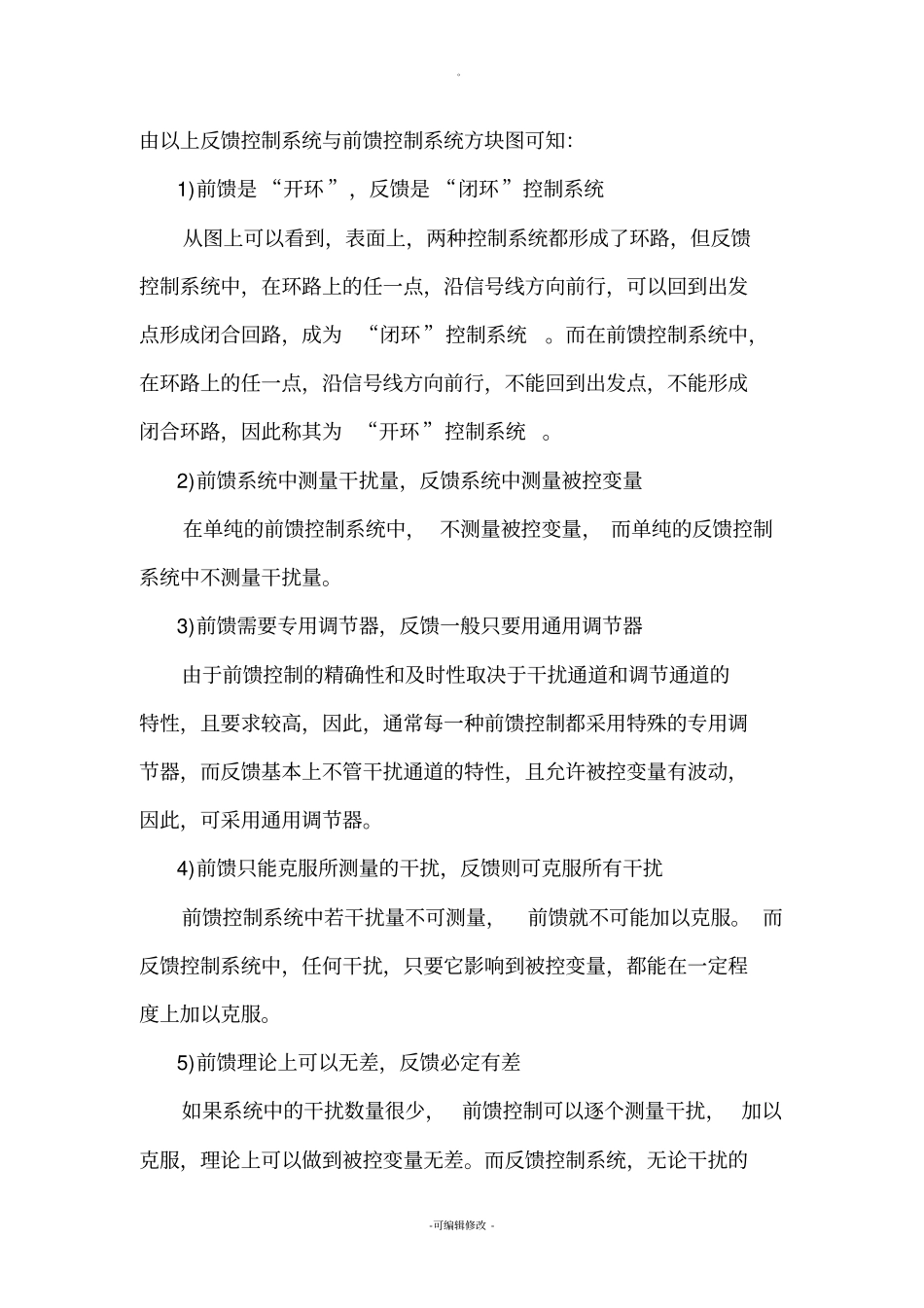
4-3)满足(1-3)式的前馈补偿装置使受控变量不受扰动量Q变化的影响
图2-4-4表示了这种全补偿过程
在Q阶跃干扰下,调节作用c和干扰作用d的响应曲线方向相反,幅值相同
所以它们的合成结果,可使达到图2
4-4前馈控制全补偿示意图理想的控制连续地维持在恒定的设定值上
显然,这种理想的控制性能,反馈控制系统是做不到的
这是因为反馈控制是按被控变量的偏差动作的
在干扰作用下,受控变量总要经历一个偏离设定值的过渡过程
前馈控制的另一突出优点是,本身不形成闭合反馈回路,不存在闭环稳定性问题,因而也就不存在控制精度与稳定性矛盾
1.前馈控制与反馈控制的比较图2
4-5反馈控制方块图图2
4-6前馈控制方块图
-可编辑修改-由以上反馈控制系统与前馈控制系统方块图可知:1)前馈是“开环”,反馈是“闭环”控制系统从图上可以看到,表面上,两种控制系统都形成了环路,但反馈控制系统中,在环路上的任一点