(二〇一八年六月本科毕业设计外文文献翻译学校代码:10128学号2014****外文题目:中文题目:学生姓名:学院:机械学院系别:测控系专业:测控技术与仪器班级:测控14-1班指导教师:×××讲师/博士ControlofElectromechanicalSystemsusingSlidingModeTechniquesHeideBrandtstadterandMartinBussAbstract—Thisarticleproposesaslidingmodecontrolforelectromechanicalsystems,forinstanceaDCmotorwithaninvertedpendulumasloadisconsidered
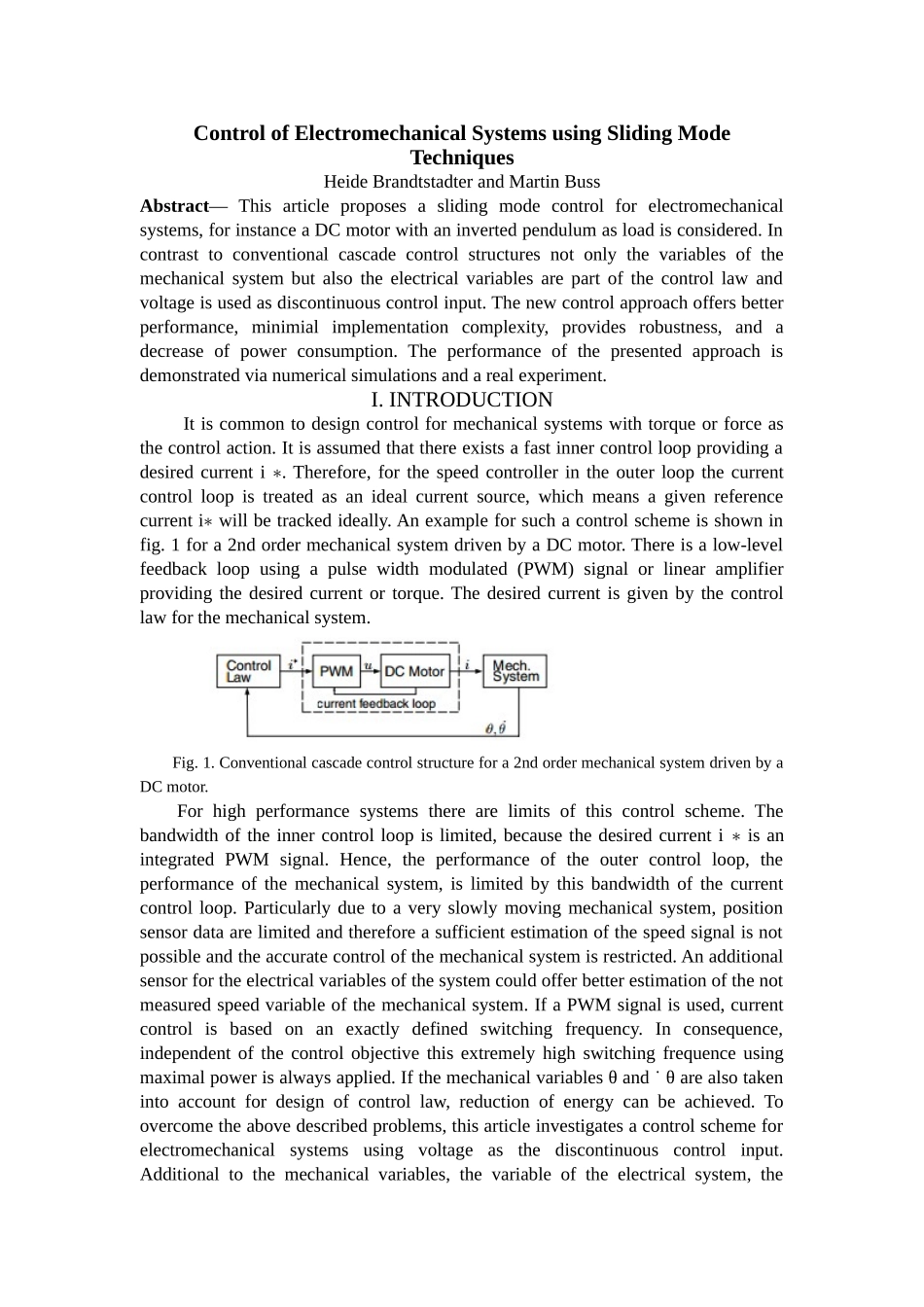
Incontrasttoconventionalcascadecontrolstructuresnotonlythevariablesofthemechanicalsystembutalsotheelectricalvariablesarepartofthecontrollawandvoltageisusedasdiscontinuouscontrolinput
Thenewcontrolapproachoffersbetterperformance,minimialimplementationcomplexity,providesrobustness,andadecreaseofpowerconsumption
Theperformanceofthepresentedapproachisdemonstratedvianumericalsimulationsandarealexperiment
INTRODUCTIONItiscommontodesigncontrolformechanicalsystemswithtorqueor