第1页共4页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共4页习题5位置控制一
选择正确的答案
闭环数控机床的飞车现象经常是由于反馈断线故障,使系统实际上成为开环状态,没有位置反馈增量从命令增量中减去,跟随误差会越来越大,直至溢出,以致引起过量的进给速度而造成事故
位置反馈断线B
数控装置运算C
伺服驱动过热2
FANUC系统能实现平滑高增益SHG(SmoothHighGain)的速度控制,能C
增加位置指令的延时B
延长定位时间C
降低位置指令的延时,缩短定位时间3
对数据进行计算处理的是
脉冲编码器C
伺服驱动装置1、以物体的位置、方向、状态等作为控制量,追踪目标值的任意变化的控制机构是B
PLC装置6
所谓插补就是根据输入线型和速度的要求,
实时分配各轴在每个插补周期内的位移量B
计算各轴下一位置控制周期的位移量C
实时计算刀具相对与工件的合成进给速度15
数控闭环伺服系统的速度反馈装置装在上
伺服电机主轴B
工作台丝杠16
在数控系统中,PA,*PA,PB,*PB,PC,*PC,+5P,0P是
CNC发出的模拟控制量信号B
光电脉冲编码器的反馈信号C
报警输出信号17
在位置控制接口中的F/V变换器的主要功能是
进给速度指令变换成电压量B
频率量变换成电压量C
频率量变换成进给速度指令值18
进给伺服系统是一种系统
机床数控系统的本质是
伺服调速系统B
位置随动系统C
过程控制系统15
在进给伺服系统中,系统增益Ks越大,则
到达指令速度的时间越短B
系统受到的冲击越大C
系统受到惯性力越小二、填充,以完成下列各表述
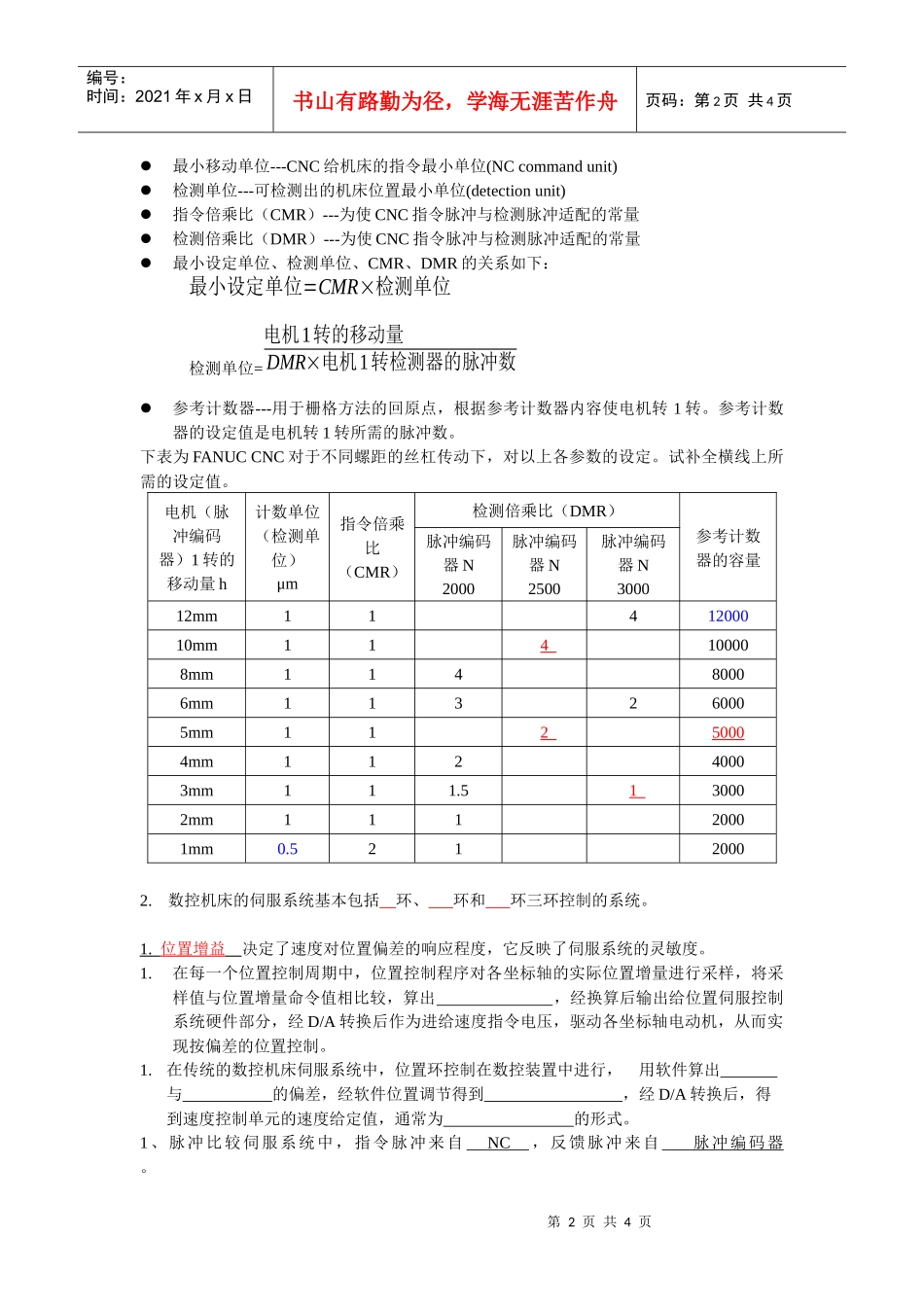
FANUC系统中有关伺服设定的术语和参数说明如下:最小设定单位---程序输入的移动