第1页共6页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共6页机械臂运动路径设计问题自1959年美国的英格伯格和德沃尔制造出世界上第一台工业机器人“尤尼梅特”开始,近半个世纪以来,机器人的研制和应用以惊人的速度发展并取得长足的进步
当今世界,机器人的应用领域已十分广泛,包括工业生产、海空探索、医疗康复和军事活动等,此外,机器人已逐渐在医院、家庭和一些服务行业获得应用
从生产车间中的焊接机械手,到水下自治式机器人,从娱乐性的拳击机器人,到伊拉克战场上的无人驾驶机,机器人已经与我们的日常生活息息相关
机器人通常分为关节式机器人(或称机械臂、机械手、机器人操作臂、工业机器人等)和移动式机器人
一般来说,前者具有更多的自由度,而后者的作业范围则更大一些
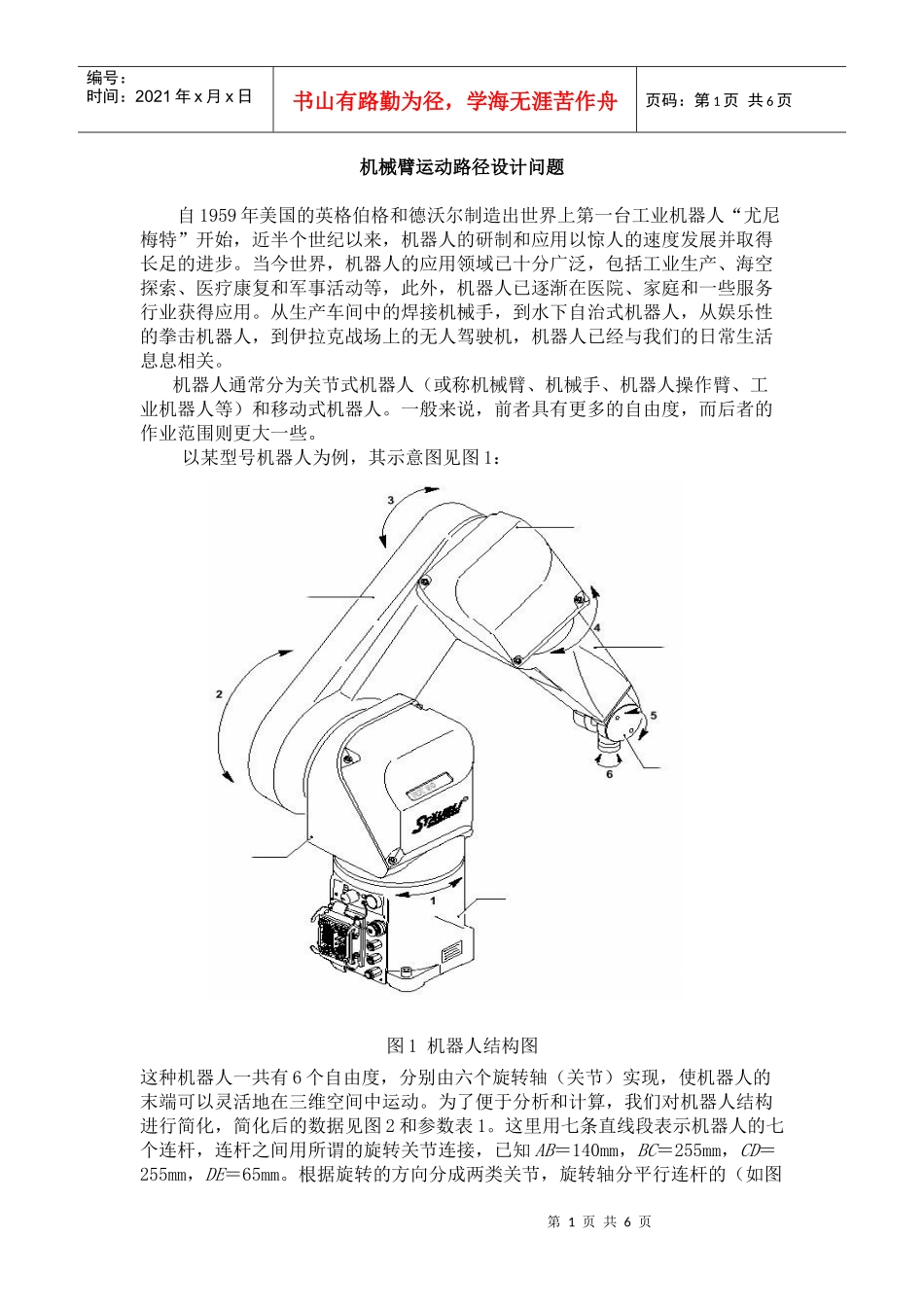
以某型号机器人为例,其示意图见图1:图1机器人结构图这种机器人一共有6个自由度,分别由六个旋转轴(关节)实现,使机器人的末端可以灵活地在三维空间中运动
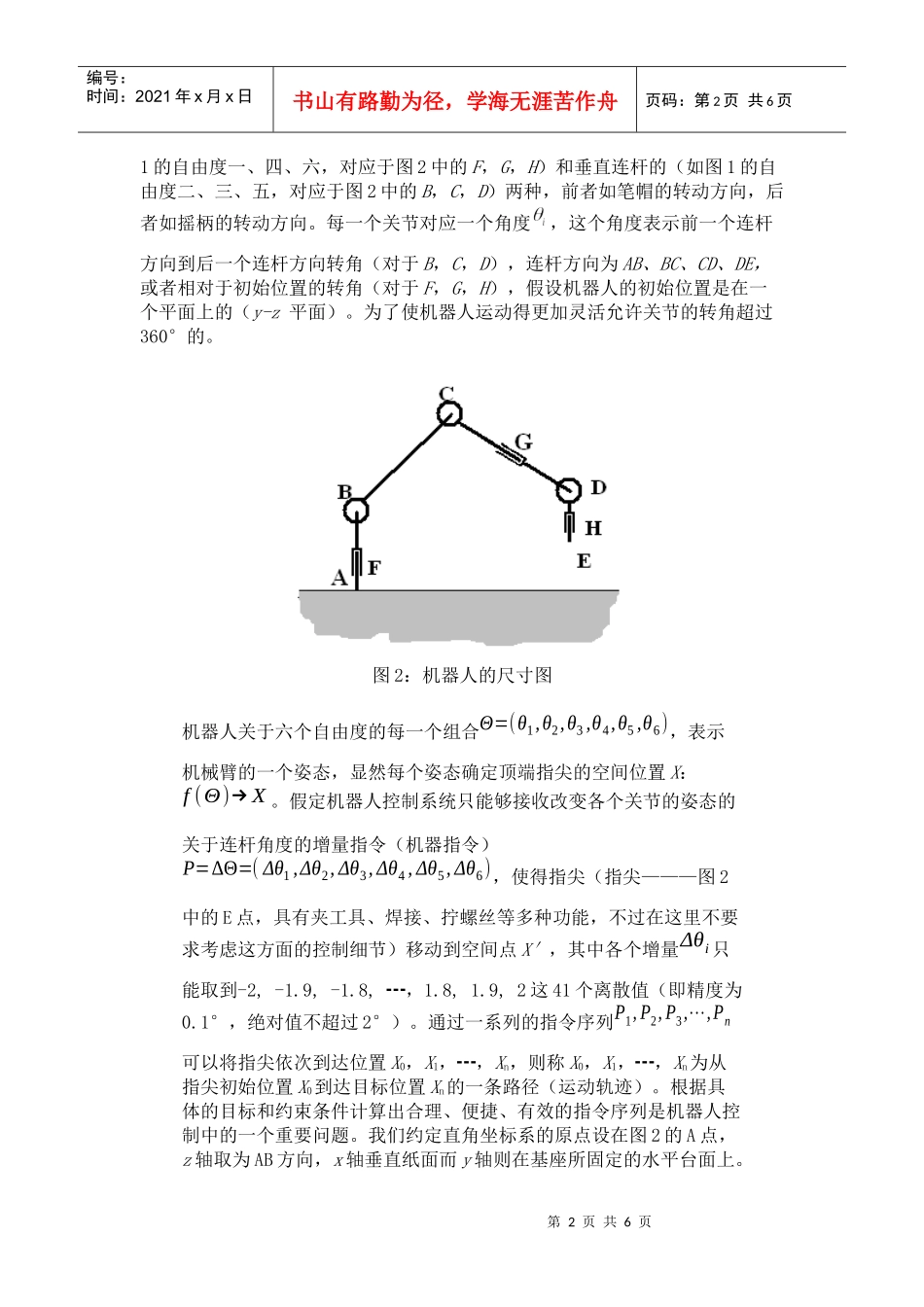
为了便于分析和计算,我们对机器人结构进行简化,简化后的数据见图2和参数表1
这里用七条直线段表示机器人的七个连杆,连杆之间用所谓的旋转关节连接,已知AB=140mm,BC=255mm,CD=255mm,DE=65mm
根据旋转的方向分成两类关节,旋转轴分平行连杆的(如图第2页共6页第1页共6页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2页共6页1的自由度一、四、六,对应于图2中的F,G,H)和垂直连杆的(如图1的自由度二、三、五,对应于图2中的B,C,D)两种,前者如笔帽的转动方向,后者如摇柄的转动方向
每一个关节对应一个角度,这个角度表示前一个连杆方向到后一个连杆方向转角(对于B,C,D),连杆方向为AB、BC、CD、DE,或者相对于初始位置的转角(对于F,G,H),假设机器人的初始位置是在一个平面上的(y-z平面)