第1页共13页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共13页第8章模糊控制在工程中的应用8
1倒立摆系统的T-S模型模糊控制模糊控制在工业过程控制、机器人控制、运载工具控制及家电产品等领域有着广泛的应用,本章重点介绍几个例子
本节课介绍基于T-S模糊模型的倒立摆控制
1倒立摆系统概述倒立摆系统是一个典型的非线性、强耦合、多变量和不稳定的高阶系统,许多抽象的控制理论概念都可以通过倒立摆实验直观的表现出来,是控制理论教学的理想实验设备和进行控制理论研究的典型实验平台,也是新成果、新方法的验证平台,开发平台,一直受到教学和科研人员的广泛关注
因此,从其肇始之日至今的半个世纪的发展历程中,先后出现了形式各异的倒立摆,大致可以分为以下五大类:直线倒立摆、平面倒立摆、斜轨道和圆轨道倒立摆以及并行倒立摆
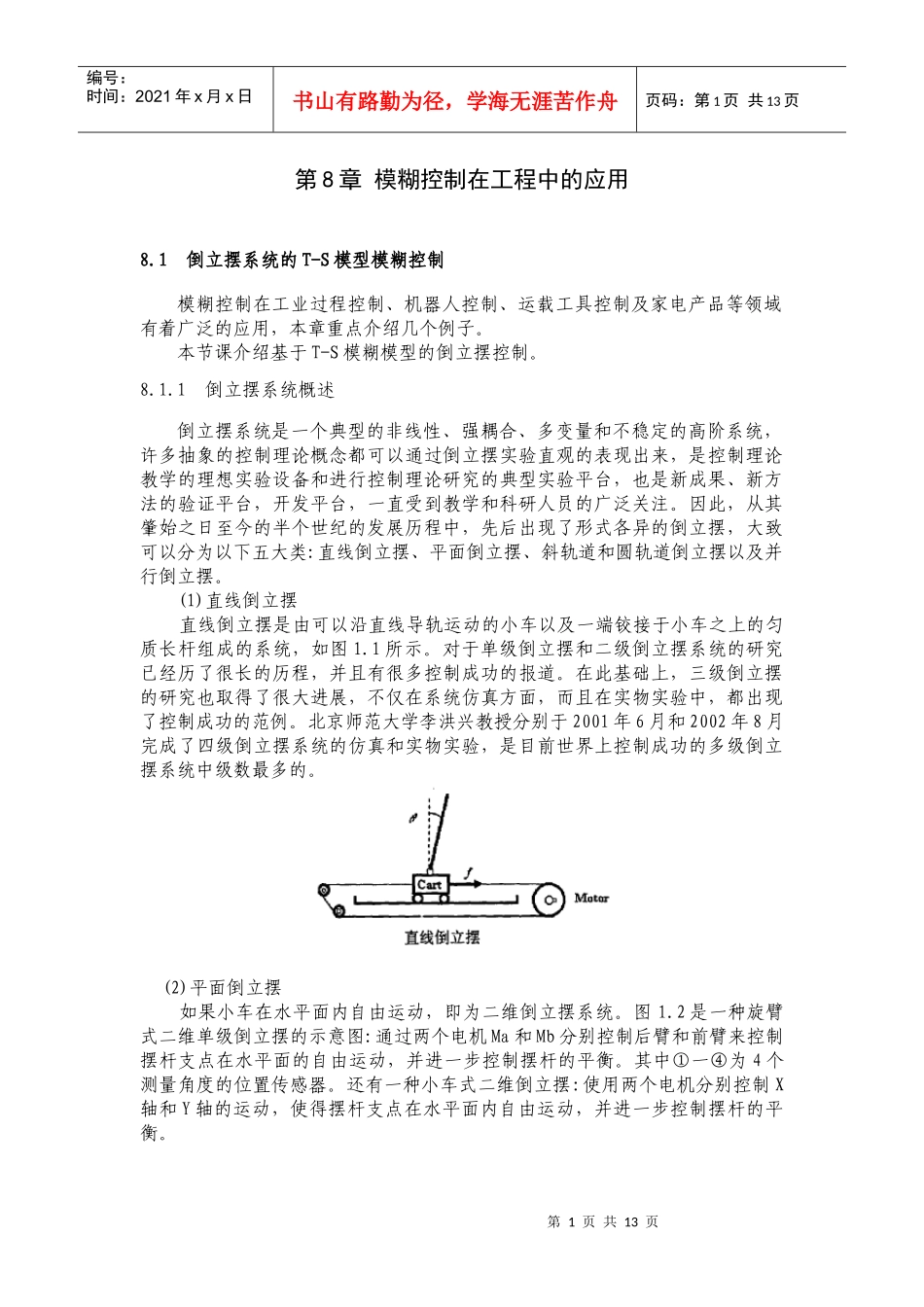
(1)直线倒立摆直线倒立摆是由可以沿直线导轨运动的小车以及一端铰接于小车之上的匀质长杆组成的系统,如图1
对于单级倒立摆和二级倒立摆系统的研究已经历了很长的历程,并且有很多控制成功的报道
在此基础上,三级倒立摆的研究也取得了很大进展,不仅在系统仿真方面,而且在实物实验中,都出现了控制成功的范例
北京师范大学李洪兴教授分别于2001年6月和2002年8月完成了四级倒立摆系统的仿真和实物实验,是目前世界上控制成功的多级倒立摆系统中级数最多的
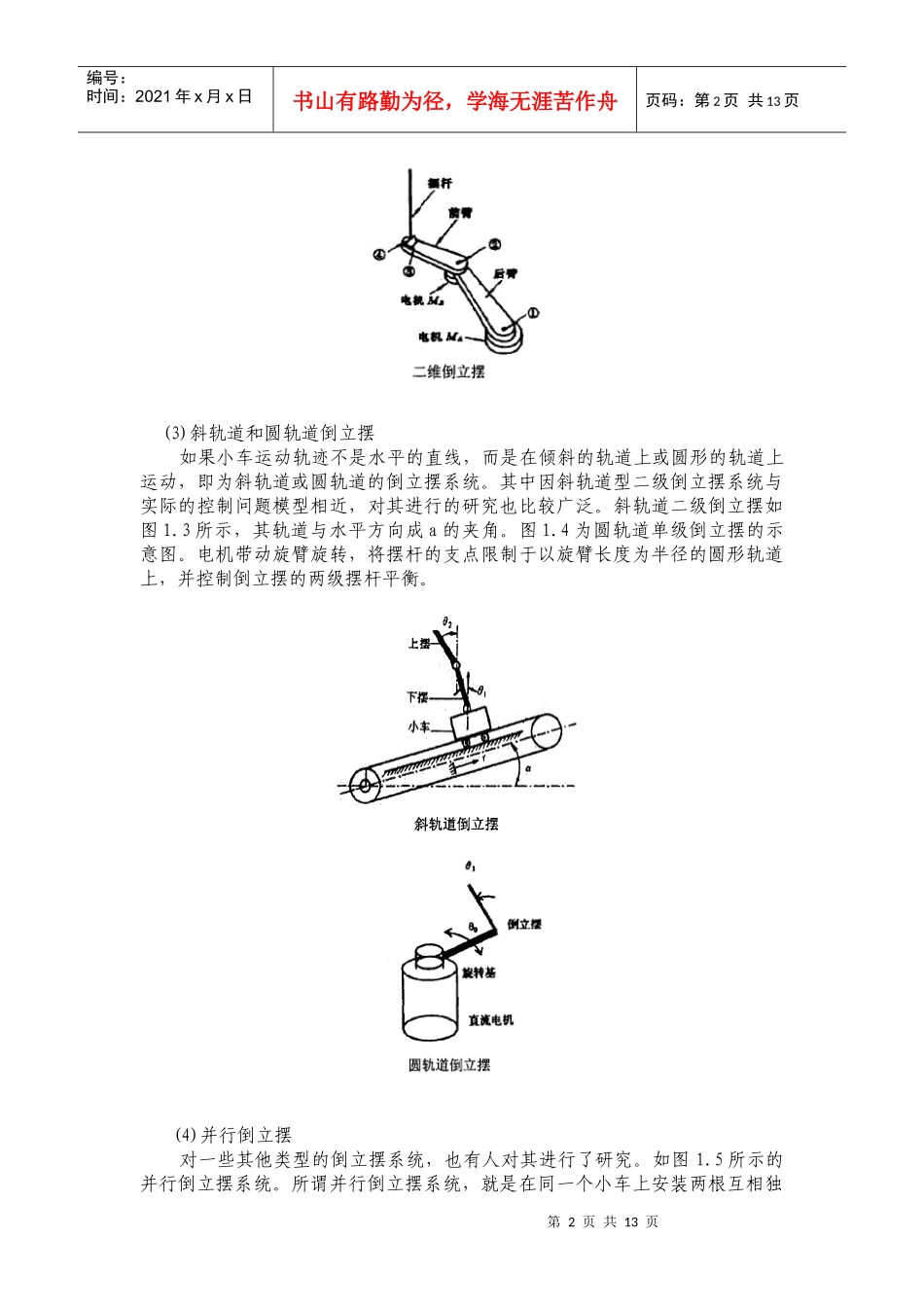
(2)平面倒立摆如果小车在水平面内自由运动,即为二维倒立摆系统
2是一种旋臂式二维单级倒立摆的示意图:通过两个电机Ma和Mb分别控制后臂和前臂来控制摆杆支点在水平面的自由运动,并进一步控制摆杆的平衡
其中①一④为4个测量角度的位置传感器
还有一种小车式二维倒立摆:使用两个电机分别控制X轴和Y轴的运动,使得摆杆支点在水平面内自由运动,并进一步控制摆杆的平衡
第2页共13页第1页共13页编号:时间:20