第1页共11页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共11页机器人激光在线检测在奇瑞A3焊装线的应用介绍摘要汽车制造过程中,要严格控制车身尺寸,那么尺寸的检测和控制方式就显得尤为关键
目前,普遍使用的有:离线的三坐标测量、Cubing模型、检具、在线的机器人激光在线检测等方法,离线和在线测量相结合能更好的控制车身尺寸
奇瑞公司主打、战略转型的A3车型,焊装就采用了COMAU设计、制造的全自动化生产线且采用激光在线检测,对车身240多个特性就行100%测量,此项技术是在自主品牌汽车中首次应用,为A3良好的性能奠定了基础
关键词激光检测三坐标测量机器人数据分析1前言汽车制造过程中,车身最重要的两个质量特性是:车身尺寸和车身强度
对车身尺寸的检测和控制方法主要有三坐标测量、Cubing模型、检具、机器人激光在线检测,各种测量方法都存在利与弊,不能对车身尺寸进行完美控制,所以必须采用综合的测量方法
奇瑞“十年磨一砺”的主打、战略车型A3,经历过开创性的“十万公里连续不间断公开测试”、“突破性的通过C-NCAP五星安全测试”,被评为“自主品牌汽车杰出品质代表”
良好的综合性能,尤其是安全性和舒适性,与奇瑞公司着力打造精品车身是分不开的
A3的优秀品质,在设计、规划、工艺、制造等投入大量人力、物力和先进技术换来的
A3在焊装车间车身制造过程中采用了全自动主线,车身下部底盘和车身骨架拼装全部采用自动化夹具和机器人焊接,并在线末采用了机器人激光在线检测
由于A3自动化生产线是有COMAU公司负责设计、制造、调试,所有机器人全部是意大利COMAU机器人,主要有NH1和NH3型号,主拼夹具采用的是COMAU公司独有OPENGATE结构,很好的保证了车身尺寸
本文结合奇瑞A3焊装COMAU自动化生产线,对机器人激光在线检测的应用控制做简单介绍
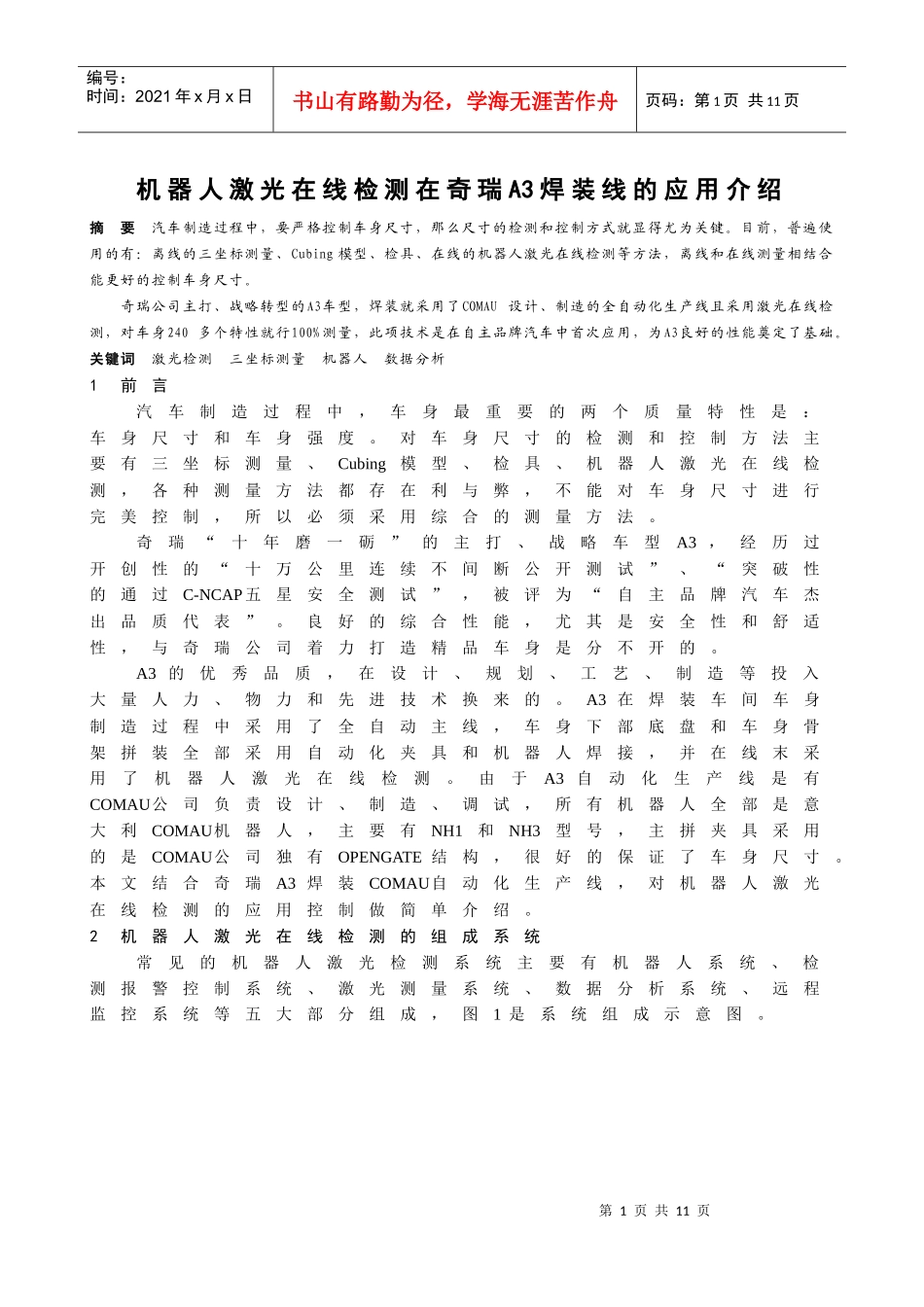
2机器人激光在线检