堆垛机转轨机构的设计引言转轨机构是转轨式堆垛机系统的重要部件
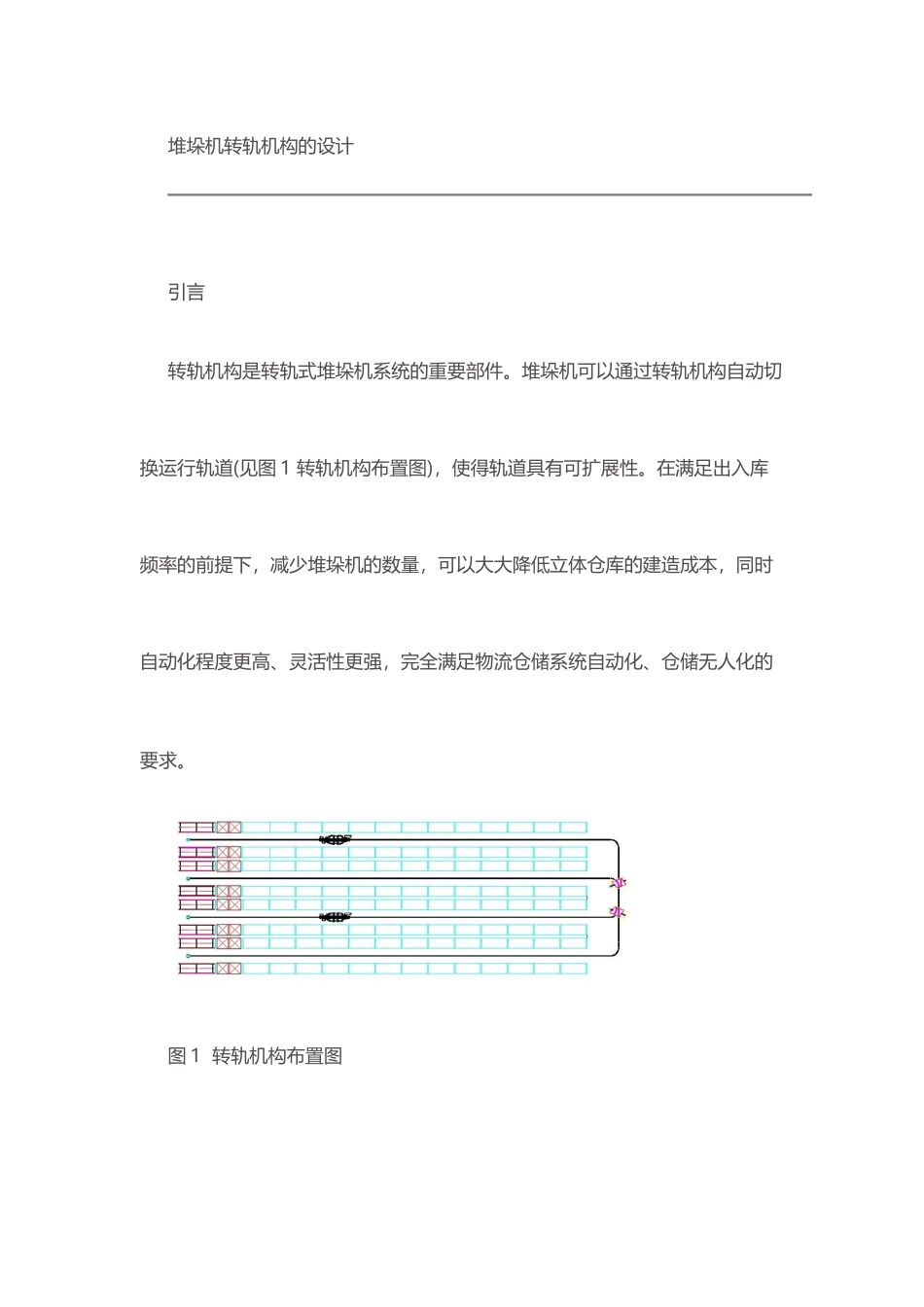
堆垛机可以通过转轨机构自动切换运行轨道(见图1转轨机构布置图),使得轨道具有可扩展性
在满足出入库频率的前提下,减少堆垛机的数量,可以大大降低立体仓库的建造成本,同时自动化程度更高、灵活性更强,完全满足物流仓储系统自动化、仓储无人化的要求
图1转轨机构布置图1转轨机构1
1主要技术指标序号项目参数值1平均速度(m/min)42运动行程(mm)2503定位精度mm)±0
54控制方式PLC5通信方式有线通信1
2结构及工作原理转轨机构主要由地面转轨机构和空中转轨机构两部分组成
地面转轨机构由驱动装置、牵引链条、底座(带滑条)、活动道岔、链条张紧装置、侧导向条、端头挡块及开关装置等组成
工作原理为驱动装置通过链条牵引活动道岔做水平平移,达到自动切换直轨和弯轨的目的
活动道岔在底座的滑条上滑动,侧导向条对活动道岔的运行方向起到限制作用
活动道岔运行到位时触发定位开关实现轨道的精确定位,另外设置端头挡块保证转轨机构的定位准确性和安全性
图2地面转轨机构b
空中转轨机构由驱动装置、牵引链条、吊座、线性滑轨、活动道岔、链条张紧装置、端头挡块及开关装置等组成
工作原理为驱动装置通过链条牵引活动道岔做水平平移,达到自动切换直轨和弯轨的目的
活动道岔悬吊在固定于吊座的线性滑轨上,活动道岔运行到位时触发定位开关实现轨道的精确定位,另外设置端头挡块保证转轨机构的的定位准确性和安全性
图3空中转轨机构1
3参数计算链条牵引力:Fn=m*g*f------1
1=200*9
3=588(N)Fn---链条牵引力,Nm---滑动部分质量,本设计取200Kgg---重力加速度,9
8m/s²f---滑动摩擦系数,取0
3设备计算功率:Pn=F*V/(60*1000*η)------1
2=588*4/(60*1000*50