引言直流电动机具有良好的起动、制动性能,宜于在大范围内平滑调速,在许多需要调速或快速正反向的电力拖动领域中得到了广泛的应用
从控制的角度来看,直流调速还是交流拖动系统的基础
该系统中设置了电流检测环节、电流调节器以及转速检测环节、转速调节器,构成了电流环和转速环,前者通过电流元件的反馈作用稳定电流,后者通过转速检测元件的反馈作用保持转速稳定,最终消除转速偏差,从而使系统达到调节电流和转速的目的
该系统起动时,转速外环饱和不起作用,电流内环起主要作用,调节起动电流保持最大值,使转速线性变化,迅速达到给定值;稳态运行时,转速负反馈外环起主要作用,使转速随转速给定电压的变化而变化,电流内环跟随转速外环调节电机的电枢电流以平衡负载电流
并通过Matlab进行系统的数学建模和系统仿真,分析双闭环直流调速系统的特性
—•设计目的1•了解自动控制系统学科
2•学习绘画双闭环直流调速系统的动态和稳态结构框图
3•掌握双闭环直流调速系统的数学模型和动态性能分析
4•体会参数设计的过程及工程设计方法的基本思路
利用MATLAB仿真
二•直流调速系统设计1•双闭环直流调速系统的组成为了使转速和电流两种负反馈分别起作用,可在系统中设置两个调节器,分别引入资料
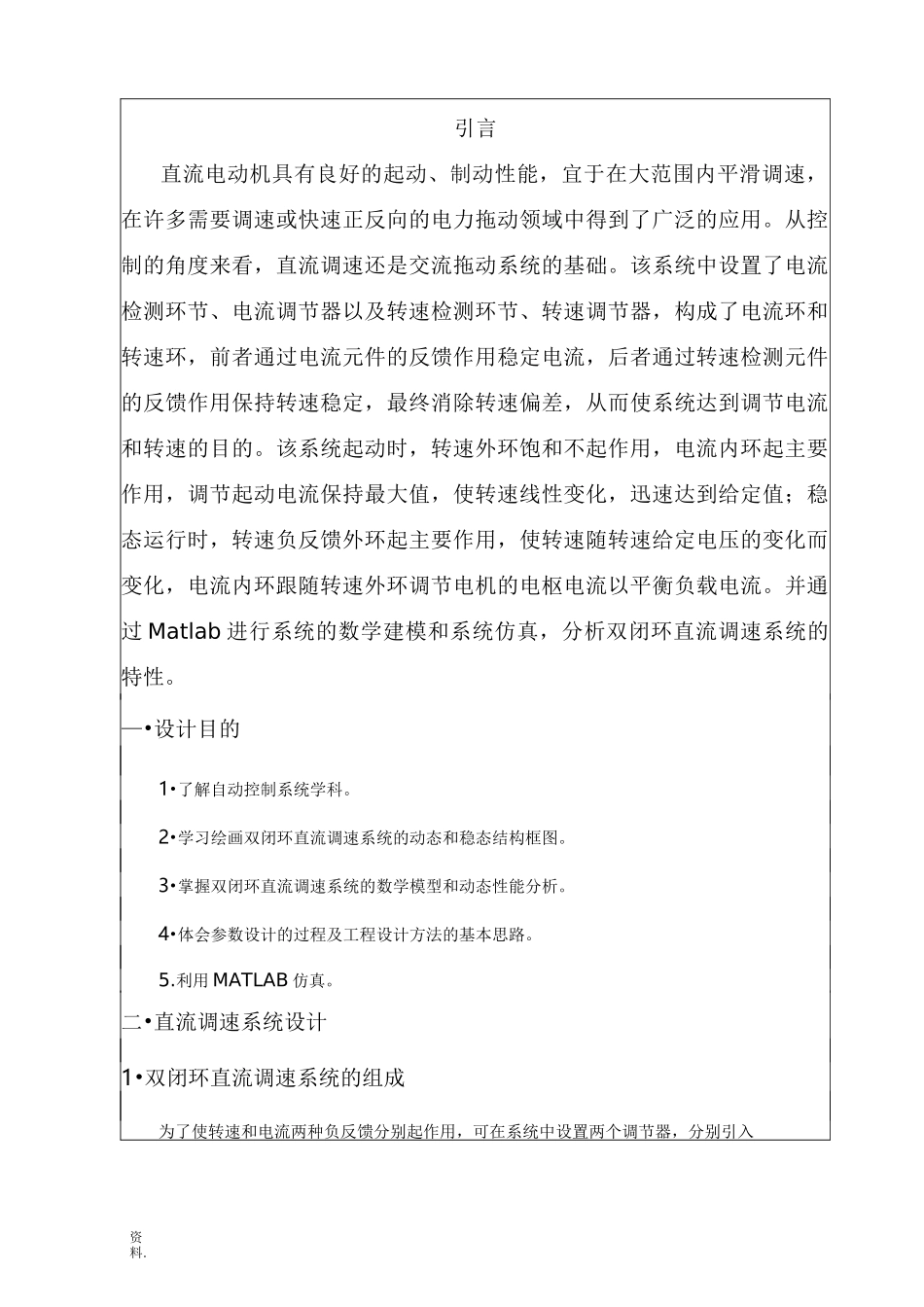
转速负反馈和电流负反馈以调节转速和电流,二者实行嵌套连接,如图一所示
把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE
从闭环结构上看,电流环在里面称为内环,转速环在外面,称作外环
这就形成了转速,电流反馈控制直流调速系统
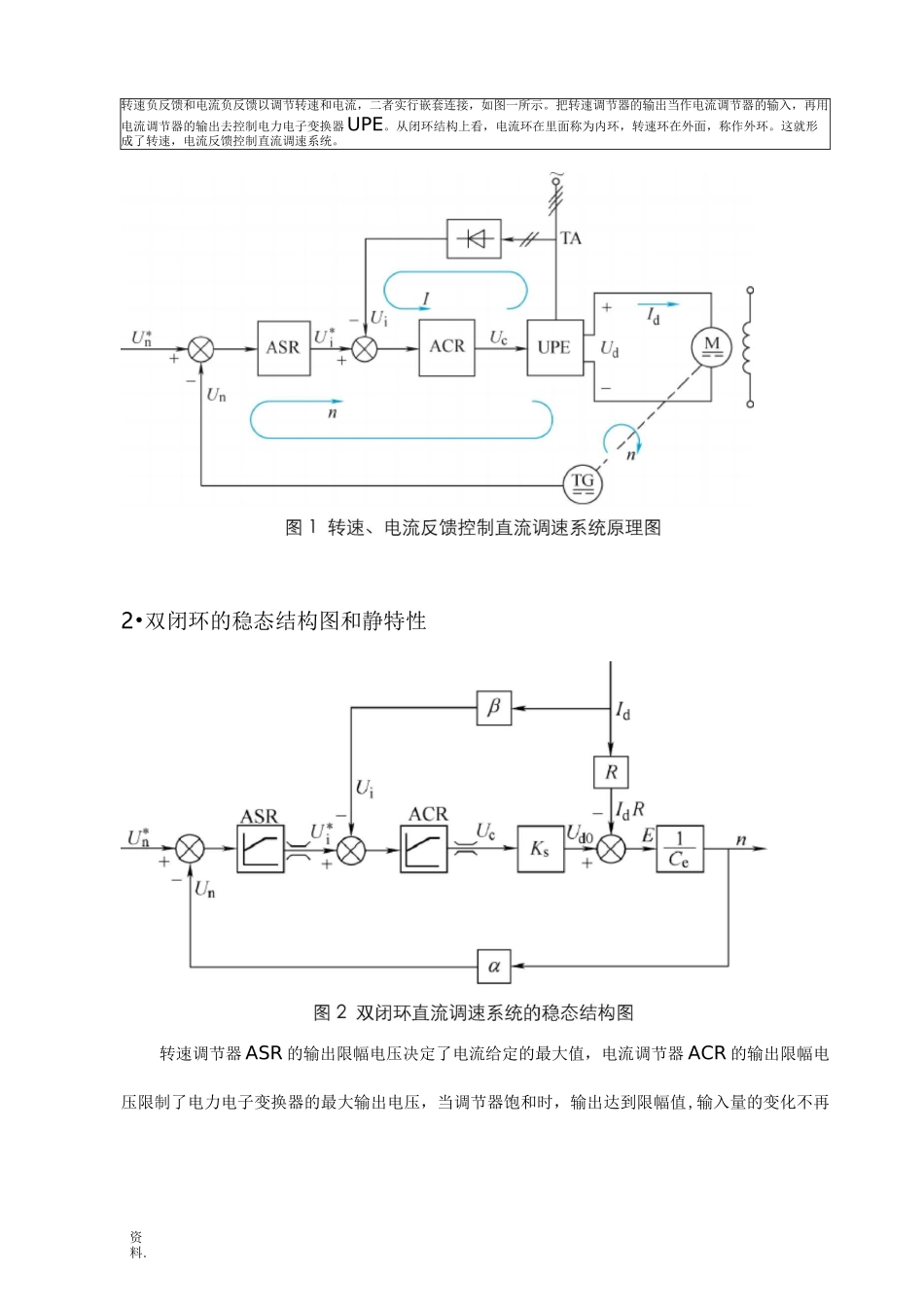
2•双闭环的稳态结构图和静特性转速调节器ASR的输出限幅电压决定了电流给定的最大值,电流调节器ACR的输出限幅电压限制了电力电子变换器的最大输出电压,当调节器饱和时,输出达到限幅值,输入量的变化不再资料
影响输出,除非有反向的输入信号使调节器退出饱和;当调节器不饱和时,PI调