基于SIMULINK的PID控制器设计与仿真1
引言MATLAB是一个适用于科学计算和工程用的数学软件系统,历经多年的发展,已是科学与工程领域应用最广的软件工具
该软件具有以下特点:数值计算功能强大;编程环简单;数据可视化功能强;丰富的程序工具箱;可扩展性能强等
Simulink是MATLAB下用于建立系统框图和仿真的环境
Simulink环境仿真的优点是:框图搭建方便、仿真参数可以随时修改、可实现完全可视化编程
比例-积分-微分(Proporitional-Integral-Derivative,PID)是在工业过程控制中最常见、应用最广泛的一种控制策略
PID控制是目前工程上应用最广的一种控制方法,其结构简单,且不依赖被控对象模型,控制所需的信息量也很少,因而易于工程实现,同时也可获得较好的控制效果
PID控制原理当我们不能将被控对象的结构和参数完全地掌握,或者是不能得到精确的数学模型时,在这种情况下最便捷的方法便是采用PID控制技术
为了使控制系统满足性能指标要求,PID控制器一般地是依据设定值与实际值的误差,利用比例(P)、积分(I)、微分(D)等基本控制规律,或者是三者进行适当地配合形成相关的复合控制规律,例如,PD、PI、PID等
图2-1是典型PID控制系统结构图
在PID调节器作用下,对误差信号分别进行比例、积分、微分组合控制
调节器的输出量作为被控对象的输入控制量
图2-1典型PID控制系统结构图PID控制器主要是依据给定值r(t)与实际输出值y(t)构成控制偏差,用公式表示即e(t)=r(t)-y(t),它本身属于一种线性控制器
通过线性组合偏差的比例(P)、积分(I)、微分(D),将三者构成控制量,进而控制受控对象
控制规律如下:其传递函数为:式中:Kp--比例系数;Ti--积分时间常数;Td--微分时间常数
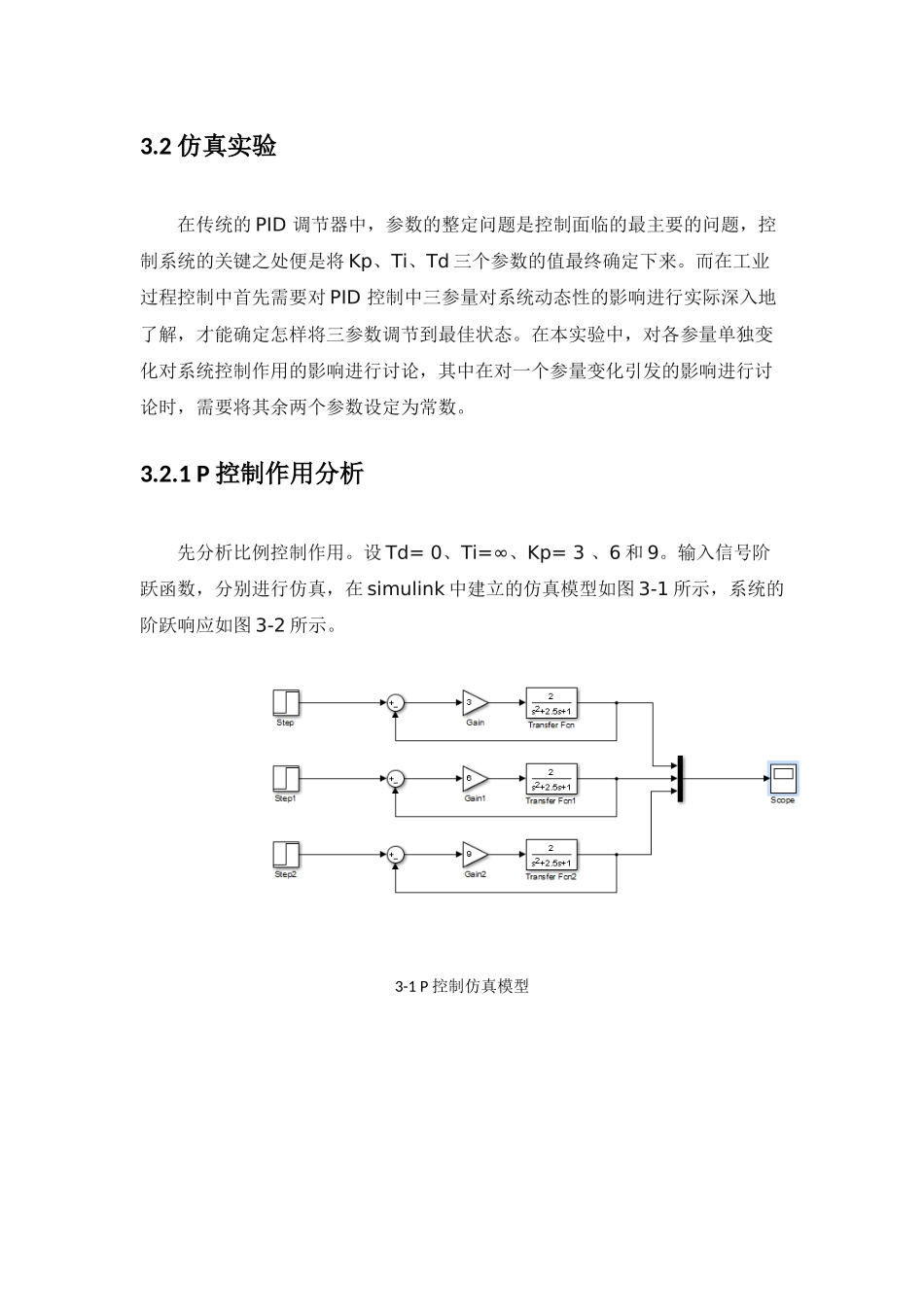
Simulink仿真3