《基于UG的运动仿真及高级仿真》项目一:机构运动仿真项目要求:熟悉UG机构运动仿真模块的内容,掌握运动仿真的一般流程和方法,并根据分析输出结果对机构进行优化
任务一:熟悉掌握运动仿真基础知识运动分析模块(Scenarioformotion)是UG/CAE模块中的主要部分,用于建立运动机构模型,分析其运动规律
通过UG/Modeling的功能建立一个三维实体模型,利用UG/Motion的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系既可建立一个运动仿真模型
UG/Motion模块可以进行机构的干涉分析,跟踪零件的运动轨迹,分析机构中零件的速度、加速度、作用力、反作用力和力矩等
运动分析模块的分析结果可以指导修改零件的结构设计(加长或缩短构件的力臂长度、修改凸轮型线,调整齿轮比等)或调整零件的材料(减轻或加重或增加硬度等)
设计的更改可以反映在装配主模型的复制品分析方案中,再重新分析,一旦确定优化的设计方案,设计更改就可反映在装配主模型中
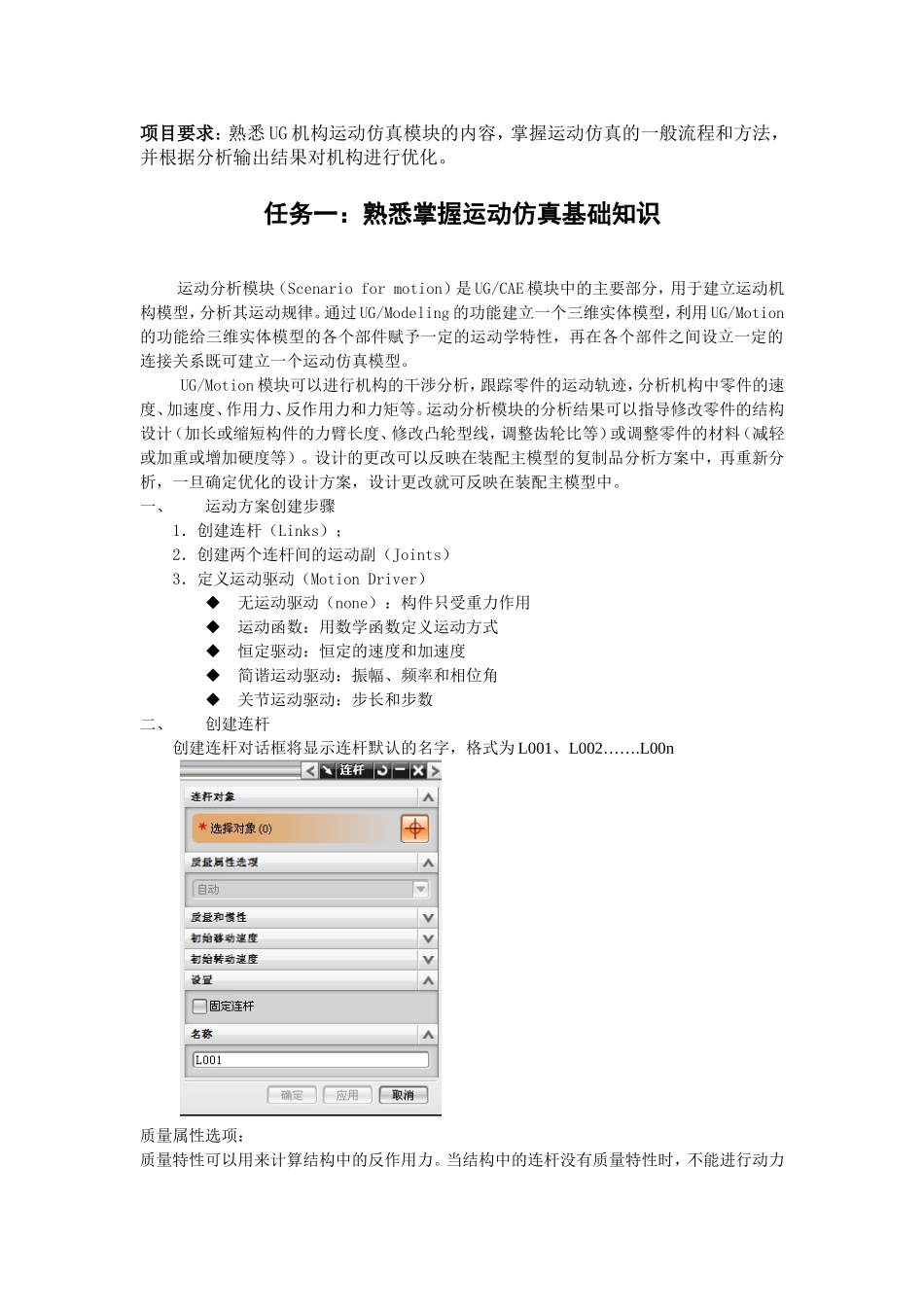
一、运动方案创建步骤1.创建连杆(Links);2.创建两个连杆间的运动副(Joints)3.定义运动驱动(MotionDriver)无运动驱动(none):构件只受重力作用运动函数:用数学函数定义运动方式恒定驱动:恒定的速度和加速度简谐运动驱动:振幅、频率和相位角关节运动驱动:步长和步数二、创建连杆创建连杆对话框将显示连杆默认的名字,格式为L001、L002……
L00n质量属性选项:质量特性可以用来计算结构中的反作用力
当结构中的连杆没有质量特性时,不能进行动力学分析和反作用力的静力学分析
根据连杆中的实体,可以按默认设置自动计算质量特性,在大多数情况下,这些默认计算值可以生成精确的运动分析结果
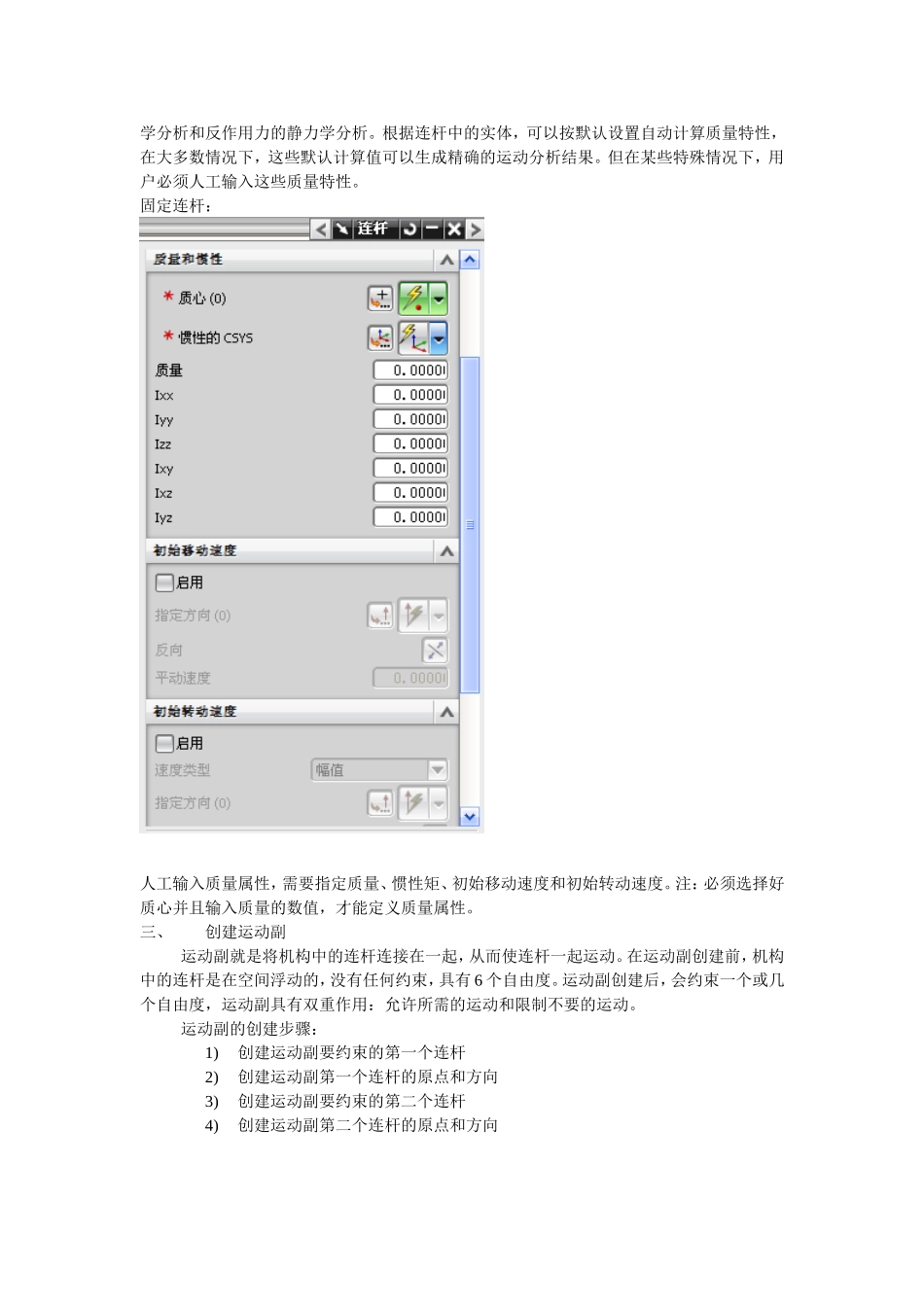
但在某些特殊情况下,用户必须人工输入这些质量特性
固定连杆:人工输入质量属性,需要指定质量、惯性