系统辨识与自适应控制1第一页,共六十三页
第一讲系统辨识的基本概念一、什么是系统辨识
机理分析建模方法(白箱法)图1单级倒立摆实验装置2010-02-202控制理论与制导技术研究中心第二页,共六十三页
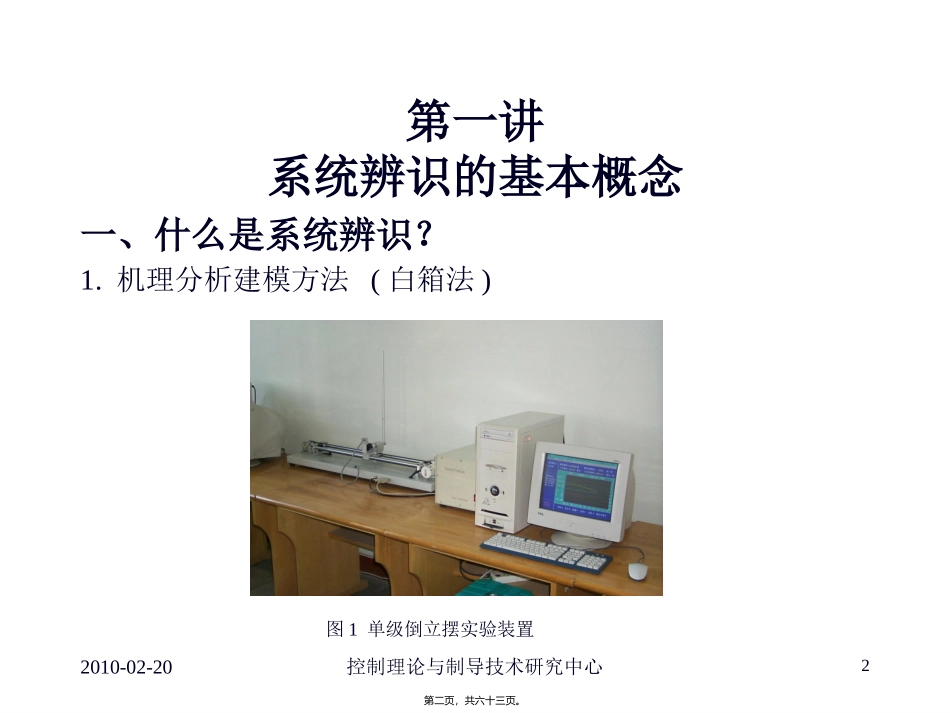
图2单级倒立摆示意图MmOuFr2010-02-203控制理论与制导技术研究中心第三页,共六十三页
图中所示变量名的物理含义如表1所示
2010-02-204控制理论与制导技术研究中心第四页,共六十三页
MruFPN步骤一:对小车进行受力分析,小车的受力分析如图3所示
图3小车受力分析图图中,P表示摆杆对小车水平方向上的作用力,单位N;N表示摆杆对小车垂直方向上的作用力,单位(N)
根据牛顿定律,小车水平方向上的力平衡方程为:2010-02-205控制理论与制导技术研究中心第五页,共六十三页
步骤二:对摆杆进行受力分析,摆杆的受力如图4所示
图4摆杆受力分析图摆杆水平方向上的力平衡方程如下,22tdrdMPFutdrdFθmgNP2010-02-206控制理论与制导技术研究中心第六页,共六十三页
sincos)sincos()cos()sin(2222mlmlrmllrmlrtddmlrtddmP将式(1-3)合并可得下式,sincos)(sincossincos222mlmlrrmMurmlmlrmrMumlmlrmrMFurmlumlrmMsincos)(22010-02-207控制理论与制导技术研究中心第七页,共六十三页
摆杆垂直方向上的力平衡方程式如下,)sincos()cos(222mlltddmm