基于RecurDyn的多体动力学仿真大规模复杂的多体系统动力学问题,尤其是复杂的多接触问题是动力学分析的难点,本文对链式输送机构应用RecurDyn软件,在导入原有实体模型的基础上,快速构建仿真模型,结果另人满意
产品开发工程师经常会遇到各种运动机构的动力学分析问题,有些情况过于复杂和特殊,特别是一些链式输送机构的动力学仿真问题,整个系统在高速的运动中涉及到的许多接触碰撞等受力情况会给系统的动力学求解带来极大的困难
RecurDyn是新一代的动力学分析软件,采用全新的运动方程理论和完全递归算法,非常适合于求解大规模复杂的多体系统动力学问题,尤其是复杂的多接触问题
本文对某一形式的链式输送机构借助RecurDyn软件进行了动力学仿真
一、系统建模该链式输送机构用于高速间歇状态下传输筒型物体,由于系统的运动主要是在一个平面的运动,因此输送带采用具有旋转约束的链节相互联接而成,链节之间加入扭转弹簧以反映平面内的扭转刚度
每个链节依靠四个抱紧臂弹性固定着传输体,这四个抱紧臂通常可简化成弹性的悬臂曲梁,本例中简化成四个刚性铰接的小爪,并加上涡卷弹簧力,也可以很好地反映出实际情况
机构的运动是通过输链器装置完成的,主要是通过上方拨动齿的往复运动和下方防止链条反向倒退的阻动齿来共同驱动的
由于上方拨动齿的位置尚需精确的定位,故将上方拨动齿的运动简化为水平方向的牵引运动
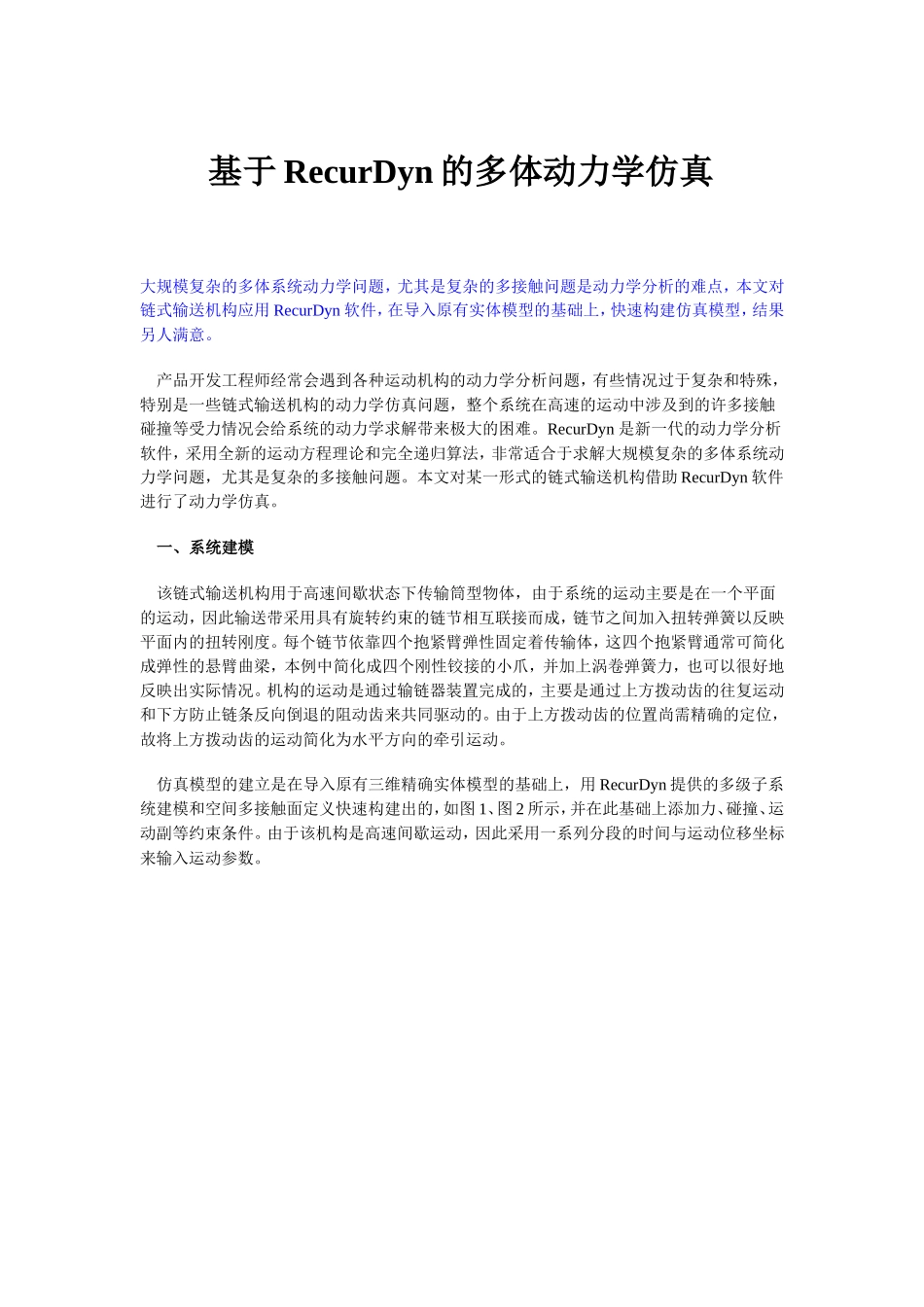
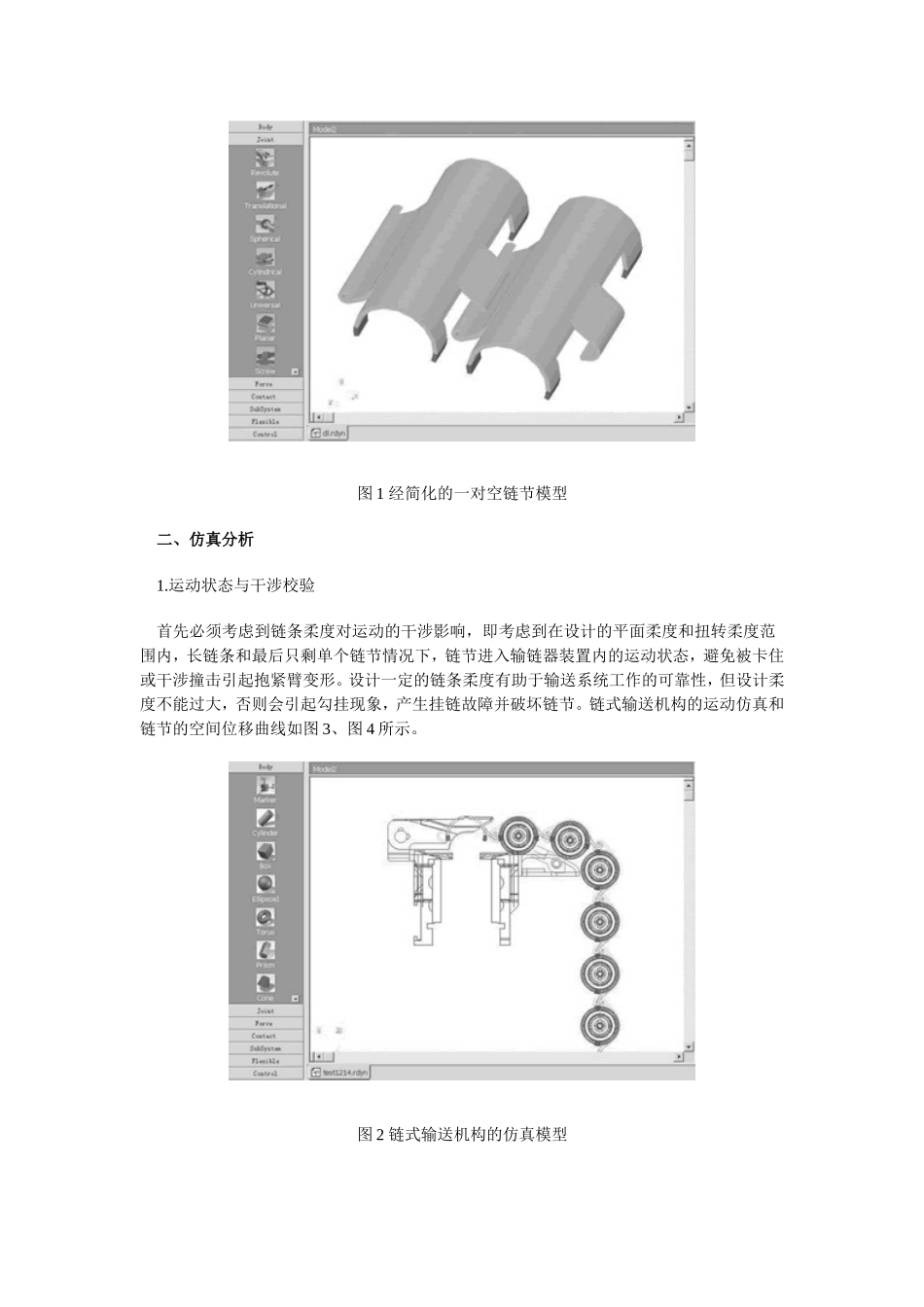
仿真模型的建立是在导入原有三维精确实体模型的基础上,用RecurDyn提供的多级子系统建模和空间多接触面定义快速构建出的,如图1、图2所示,并在此基础上添加力、碰撞、运动副等约束条件
由于该机构是高速间歇运动,因此采用一系列分段的时间与运动位移坐标来输入运动参数
图1经简化的一对空链节模型二、仿真分析1
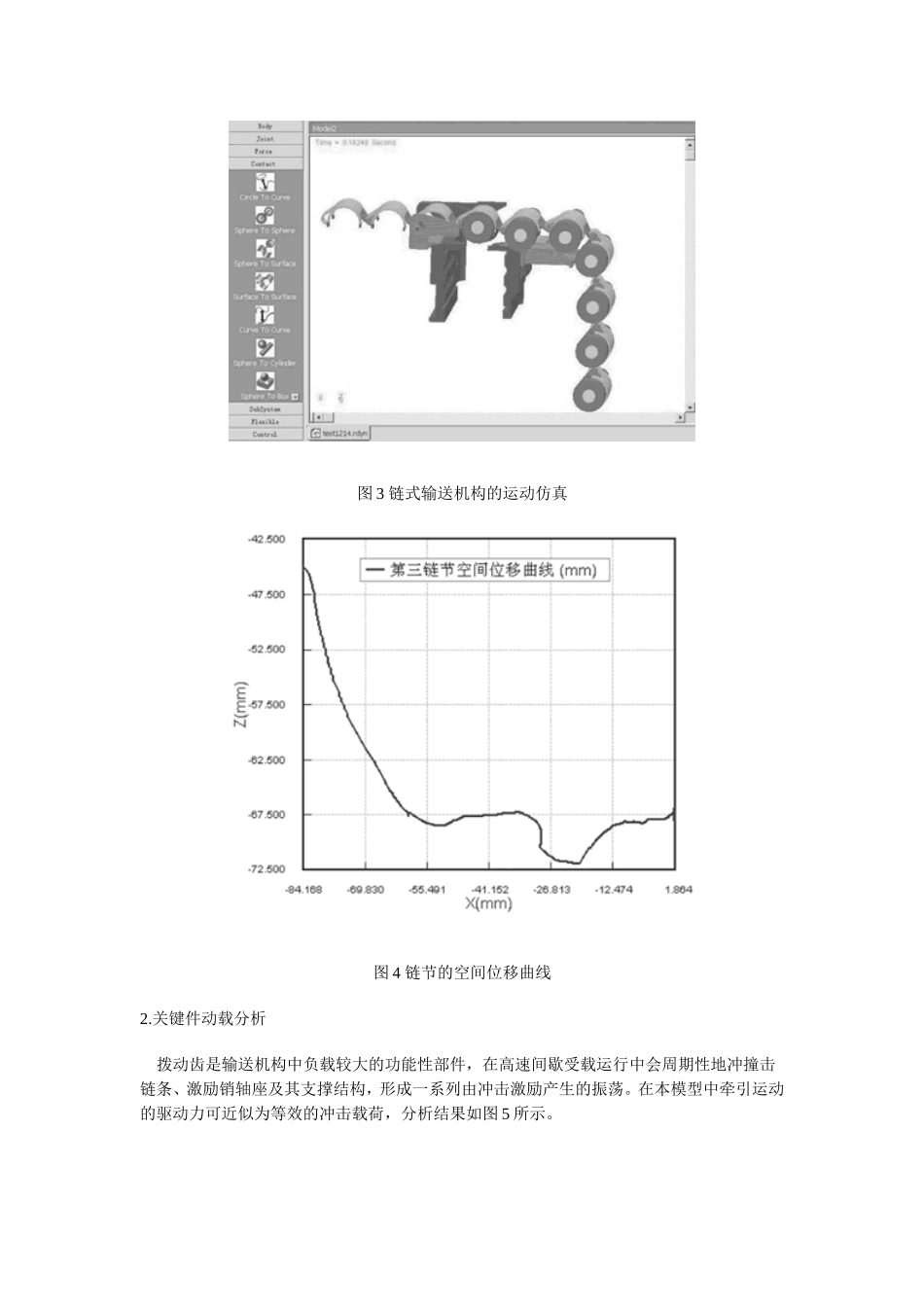
运动状态与干涉校验首先必须考虑到链条柔度对运动的干涉影响,即考虑到在设计的平面柔度和扭转柔度范围内,长链条和最后只剩单个