什么叫做手拉手模型
前面的文章已经讲到过了,简单的来讲就是共顶点等腰旋转
主要抓三个条件:1共顶点2:等腰(等边,正方形等等,换句话讲共顶点的两边相等)3:顶角相等手拉手模型之等边三角形AE如上面左图,两个等边三角形共顶点,然后连接BD,AE就好比两个三角形左手拉左手,右手拉右手
而这个图形中结论本身就不少,但是当B,C,E三点共线时结论就更多了,接下来咱们一起来看看到底有多少常见的结论
同学们该拿出笔记划重点了
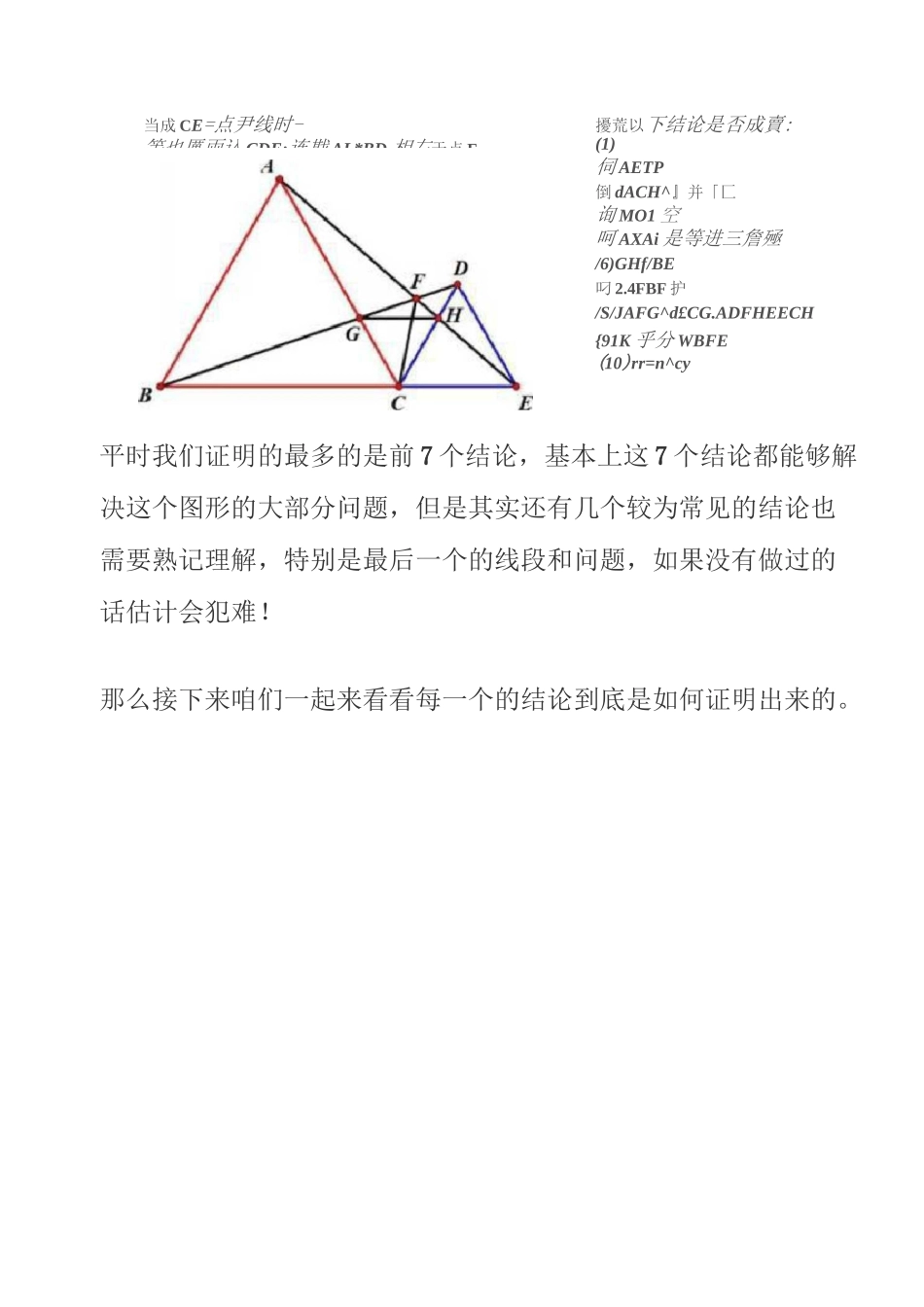
擾荒以下结论是否成賣:(1)伺AETP倒dACH^』并「匚询MO1空呵AXAi是等进三詹殛/6)GHf/BE叼2
4FBF护/S/JAFG^d£CG
ADFHEECH{91K乎分WBFE(10)rr=n^cy平时我们证明的最多的是前7个结论,基本上这7个结论都能够解决这个图形的大部分问题,但是其实还有几个较为常见的结论也需要熟记理解,特别是最后一个的线段和问题,如果没有做过的话估计会犯难
那么接下来咱们一起来看看每一个的结论到底是如何证明出来的
当成CE=点尹线时-等也厲両込CDE:连戡AL*BD,相左于点F,t\CG=CH连接聞J
ACGJ71#边三堀形
(5)成立丁^4(23=60^
^CGH-^ACB-60^rJ
GH^EC即iGHPRE(6)蝕十〔■在ZUFG和上丑CG中
上CAE二4EB、4GF二/
AA^G«-A^CG二^iFG=^BCG=6Gci即,^AFB=6OC_
(7)咸立CF=CQ
4CF二aCQSCE/
乙CF十厶ICQNBQQ亠厶u
即2^ACR^^FCQ二AFQ2是等边三角形
CF=FQ\'^=ffQ+FO化EFNF+CF(1&)最后第十个结论的证明辅助线可谓神来之笔,巧妙地构造了全等的同时还构造出了60
的角,大家可以好好感受一下
同样的套路,给大家留一道变式训练练练手:手拉手之等腰三角形常见的等腰三角形的手拉手有以下的几种样