1课题研究背景及意义1
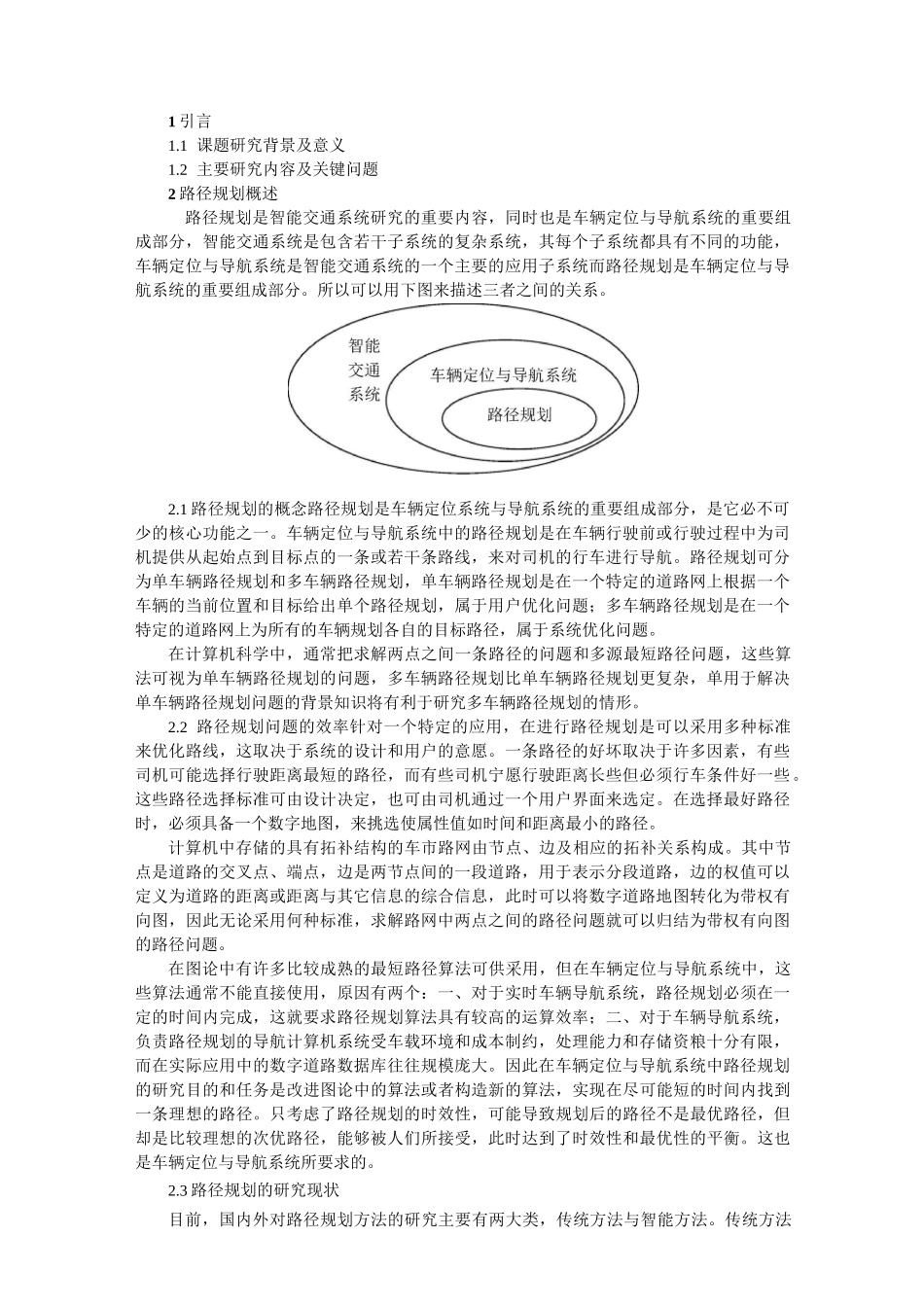
2主要研究内容及关键问题2路径规划概述路径规划是智能交通系统研究的重要内容,同时也是车辆定位与导航系统的重要组成部分,智能交通系统是包含若干子系统的复杂系统,其每个子系统都具有不同的功能,车辆定位与导航系统是智能交通系统的一个主要的应用子系统而路径规划是车辆定位与导航系统的重要组成部分
所以可以用下图来描述三者之间的关系
1路径规划的概念路径规划是车辆定位系统与导航系统的重要组成部分,是它必不可少的核心功能之一
车辆定位与导航系统中的路径规划是在车辆行驶前或行驶过程中为司机提供从起始点到目标点的一条或若干条路线,来对司机的行车进行导航
路径规划可分为单车辆路径规划和多车辆路径规划,单车辆路径规划是在一个特定的道路网上根据一个车辆的当前位置和目标给出单个路径规划,属于用户优化问题;多车辆路径规划是在一个特定的道路网上为所有的车辆规划各自的目标路径,属于系统优化问题
在计算机科学中,通常把求解两点之间一条路径的问题和多源最短路径问题,这些算法可视为单车辆路径规划的问题,多车辆路径规划比单车辆路径规划更复杂,单用于解决单车辆路径规划问题的背景知识将有利于研究多车辆路径规划的情形
2路径规划问题的效率针对一个特定的应用,在进行路径规划是可以采用多种标准来优化路线,这取决于系统的设计和用户的意愿
一条路径的好坏取决于许多因素,有些司机可能选择行驶距离最短的路径,而有些司机宁愿行驶距离长些但必须行车条件好一些
这些路径选择标准可由设计决定,也可由司机通过一个用户界面来选定
在选择最好路径时,必须具备一个数字地图,来挑选使属性值如时间和距离最小的路径
计算机中存储的具有拓补结构的车市路网由节点、边及相应的拓补关系构成
其中节点是道路的交叉点、端点,边是两节点间的一段道路,用于表示分段道路,边的权值可以定义为道路的距离或距离与其它信息的综合信息,此