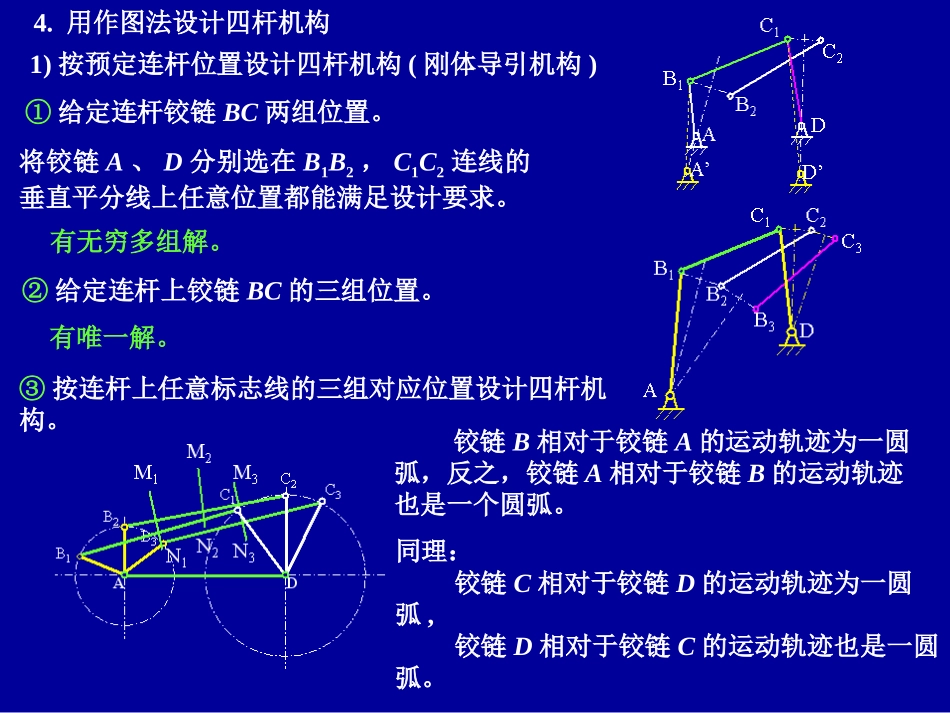
1)按预定连杆位置设计四杆机构(刚体导引机构)①给定连杆铰链BC两组位置
将铰链A、D分别选在B1B2,C1C2连线的垂直平分线上任意位置都能满足设计要求
②给定连杆上铰链BC的三组位置
有无穷多组解
用作图法设计四杆机构③按连杆上任意标志线的三组对应位置设计四杆机构
铰链B相对于铰链A的运动轨迹为一圆弧,反之,铰链A相对于铰链B的运动轨迹也是一个圆弧
同理:铰链C相对于铰链D的运动轨迹为一圆弧,铰链D相对于铰链C的运动轨迹也是一圆弧
1)按预定连杆位置设计四杆机构(刚体导引机构)①给定连杆铰链BC两组位置
将铰链A、D分别选在B1B2,C1C2连线的垂直平分线上任意位置都能满足设计要求
②给定连杆上铰链BC的三组位置
有无穷多组解
用作图法设计四杆机构③按连杆上任意标志线的三组对应位置设计四杆机构
铰链B相对于铰链A的运动轨迹为一圆弧,反之,铰链A相对于铰链B的运动轨迹也是一个圆弧
同理:铰链C相对于铰链D的运动轨迹为一圆弧,铰链D相对于铰链C的运动轨迹也是一圆弧
1)按预定连杆位置设计四杆机构(刚体导引机构)①给定连杆铰链BC两组位置
将铰链A、D分别选在B1B2,C1C2连线的垂直平分线上任意位置都能满足设计要求
②给定连杆上铰链BC的三组位置
有无穷多组解
用作图法设计四杆机构③按连杆上任意标志线的三组对应位置设计四杆机构
铰链B相对于铰链A的运动轨迹为一圆弧,反之,铰链A相对于铰链B的运动轨迹也是一个圆弧
同理:铰链C相对于铰链D的运动轨迹为一圆弧,铰链D相对于铰链C的运动轨迹也是一圆弧
作者:潘存云教授A’D’已知:机架长度d和连杆上某一标志线的三组对应位置:M1N1、M2N2、M3N3,求铰链B、C的位置
分析:铰链A、D相对于铰链B、C的运动轨迹各为一圆弧,依据转化原理,将连杆固定作为机架,得一转化机构,在转化机构中