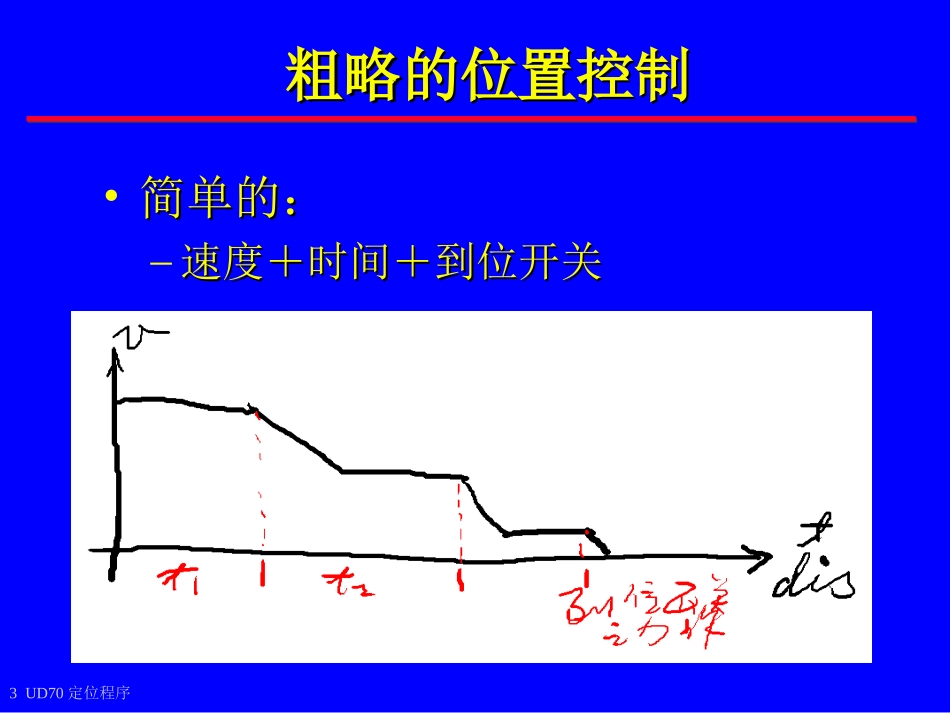
1UD70定位程序UD70UD70位置控制位置控制位置控制的要点位置控制的要点解决方案解决方案CTCT的解决方案的解决方案AdvancedPositionControllerAdvancedPositionController我们提供的定位程序我们提供的定位程序2UD70定位程序位置控制的要点位置控制的要点•要求在尽可能短的时间内走行到位要求在尽可能短的时间内走行到位•一般要求较高的定位精度一般要求较高的定位精度•定位过程不允许有超调定位过程不允许有超调•控制算法要求简单控制算法要求简单3UD70定位程序粗略的位置控制粗略的位置控制•简单的:简单的:–速度+时间+到位开关速度+时间+到位开关4UD70定位程序粗略的位置控制粗略的位置控制•不能精确定位不能精确定位•效率不高效率不高•目标位置处需安装到位开关目标位置处需安装到位开关•定位重复性不高定位重复性不高•一般由一般由PLCPLC的定时器控制的定时器控制5UD70定位程序CTCT的位控方案的位控方案•UnidriveUnidrive++UD7xUD7x•UnidriveUnidrive具有优异的速度控制指标具有优异的速度控制指标–推荐使用“伺服”或“闭环矢量”模推荐使用“伺服”或“闭环矢量”模式式•UD7xUD7x提供实时的提供实时的DPLDPL位控程序位控程序–操作系统内置的操作系统内置的AdvancedPositionConAdvancedPositionControllertroller–自行开发的位控程序自行开发的位控程序6UD70定位程序AdvancedPositionControllerAdvancedPositionController•UD7xUD7x版本版本v2
06及以上内置于及以上内置于OSOS•基于编码器位置反馈基于编码器位置反馈•位置分辨率为位置分辨率为11编码器线编码器线•