二自由度机械臂实验报告实验报告课程名称:机电系统建模与控制实验项目名称:■二自由度机械臂实验■组别:第6组成员:刘仕杰■胡据林■王昊阳■于骁实验日期:2019年12月9日、实验简介二自由度(DOF)串联柔性(2DSFJ)机械臂包括两个用于驱动谐波齿轮箱(零回转间隙)的直流电机及一个双杆串联机构()
两个连接都是刚性的
主连接通过一个柔性关节耦合到第一个驱动器上,在其端部载有第二个谐波驱动器,该驱动器通过另一个柔性关节与第二个刚性连接耦合
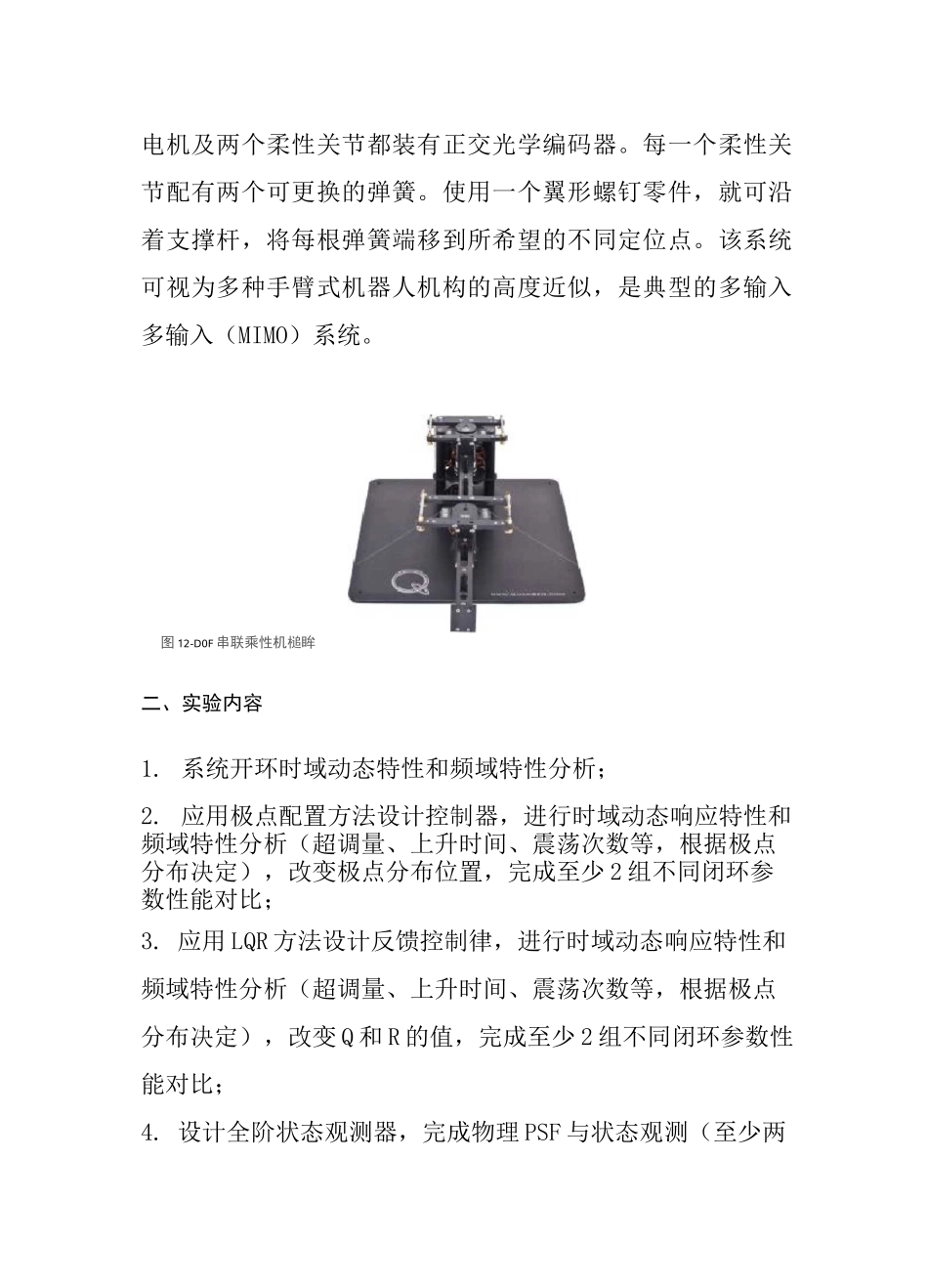
两个电机及两个柔性关节都装有正交光学编码器
每一个柔性关节配有两个可更换的弹簧
使用一个翼形螺钉零件,就可沿着支撑杆,将每根弹簧端移到所希望的不同定位点
该系统可视为多种手臂式机器人机构的高度近似,是典型的多输入多输入(MIMO)系统
图12-D0F串联乘性机槌眸二、实验内容1
系统开环时域动态特性和频域特性分析;2
应用极点配置方法设计控制器,进行时域动态响应特性和频域特性分析(超调量、上升时间、震荡次数等,根据极点分布决定),改变极点分布位置,完成至少2组不同闭环参数性能对比;3
应用LQR方法设计反馈控制律,进行时域动态响应特性和频域特性分析(超调量、上升时间、震荡次数等,根据极点分布决定),改变Q和R的值,完成至少2组不同闭环参数性能对比;4
设计全阶状态观测器,完成物理PSF与状态观测(至少两组观测器极点位置)综合作用下的系统性能控制
三、实验设备1
设备构造与线路图图2
12-DOF串联柔性机械臂表1t-DOF串联棗■性机械臂组件命名法描述编号描述谐波传动器#1(肩部)12柔性关节#1负载转换谐波传动器#2(肘部》13柔性关节#2驱动转换直流电机#1(肩部》14柔性关节#2直流电机#2(肘部)15柔性关节#1弹贲电机#1编码器16柔性关节#2弹赞电机#2编码器17弹簧夹具机构刚性连接#118底座刚性连接#219柔性关节#1编码器