第二章直流电动机的电力拖动第一节电力拖动系统的运动方程式第二节生产机械的负载转矩特性第三节他励直流电动机的机械特性第四节他励直流电动机的起动第五节他励直流电动机的制动第六节他励直流电动机的调速电力拖动是以电动机作为原动机,来带动生产机械按人们所给定的规律运动
电力拖动系统由电动机、传动机构、电气控制设备、电源和生产机械负载等组成
学习电动机的目的是为了使用电动机,把电动机运用于拖动控制系统中
需要用到第一章的基本理论和基本公式来解决电力拖动系统的起动、制动和调速等基本问题
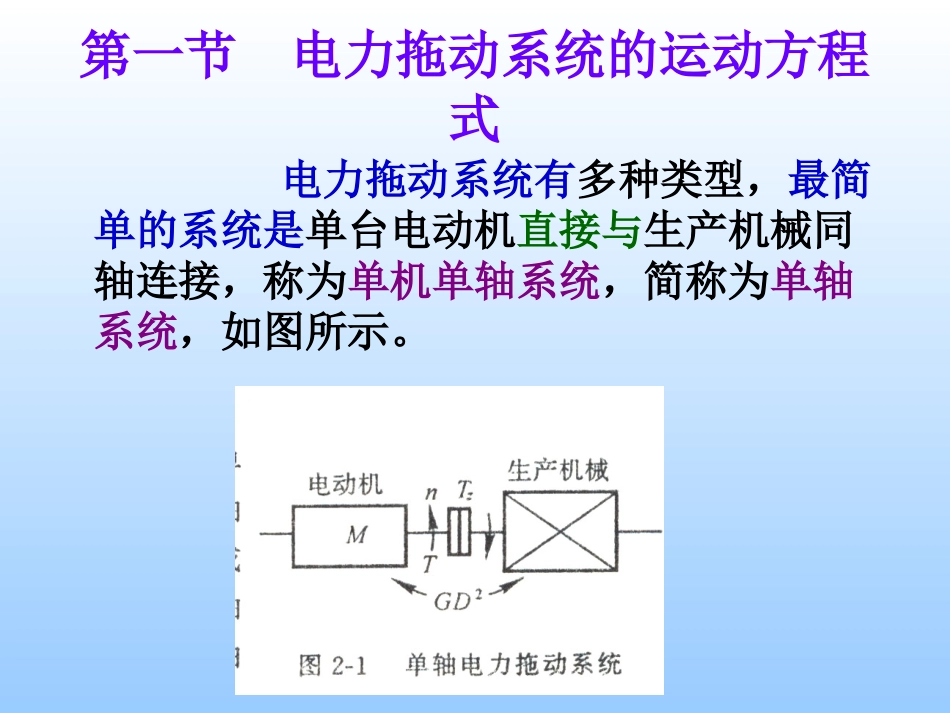
第一节电力拖动系统的运动方程式电力拖动系统有多种类型,最简单的系统是单台电动机直接与生产机械同轴连接,称为单机单轴系统,简称为单轴系统,如图所示
在多数情况下,由于生产机械转速较低或具有直线运动部件,所以电动机必须通过传动机构多根转轴的传动,才能带动生产机械运动,称为单机多轴系统,简称为多轴系统,如图所示
当电动机与工作机构不同轴时,两者之间有传动机构,用以变速或变换运动方式
即实际电力拖动系统中,电动机与负载的工作机构间常采用齿轮传动,蜗轮、蜗杆等传动机构,使电力拖动系统的轴不只一根
在少数场合,有两台或多台电动机来带动一个或多个工作机构,称为多电动机拖动系统,简称多机系统
电力拖动系统工作时,有些部件是作直线运动,如起重机的吊钩等
有些部件是作旋转运动的,如齿轮机构等
分析电力拖动系统的运动规律,最主要的任务是要研究作用在电动机转轴上的转矩及负载转矩与电动机转速之间的关系
包括稳定运行时的关系及处于暂态过程中的关系
对于单轴系统较简单;对于多轴系统,各根转轴的转速和作用于各转轴上的转矩都不相同,情况比较复杂
一般的分析方法是先对单轴系统进行研究,得出一般规律
对于多轴系统,则通过折算将其等效成一个单轴系统,这样就可以利用单轴系统的规律来分析多轴系统
一.单轴系统的运动方程式如图所示,生产机械的转矩T2