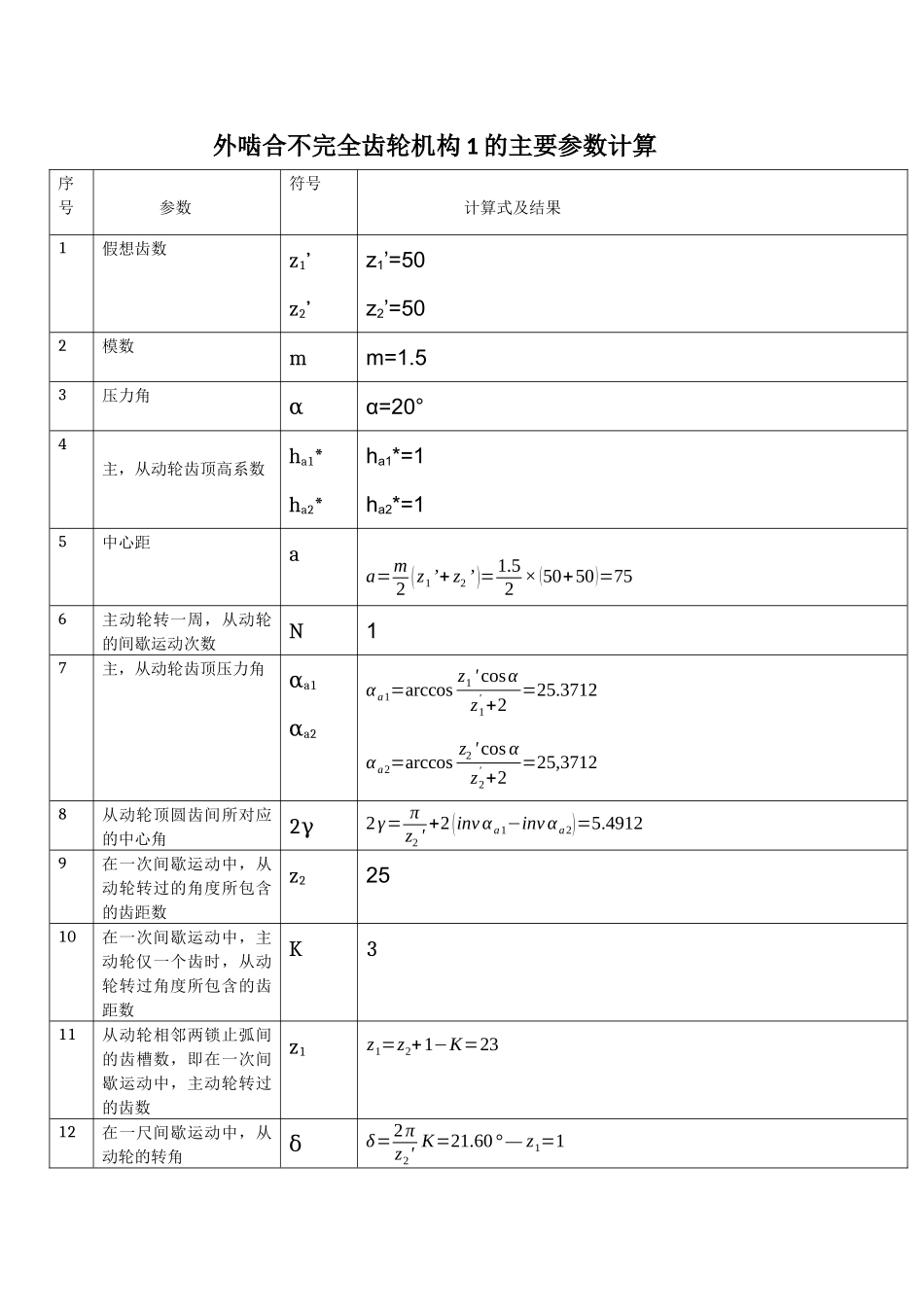
外啮合不完全齿轮机构1的主要参数计算序号参数符号计算式及结果1假想齿数z1’z2’z1’=50z2’=502模数mm=1
53压力角αα=20°4主,从动轮齿顶高系数ha1*ha2*ha1*=1ha2*=15中心距aa=m2(z1’+z2’)=1
52×(50+50)=756主动轮转一周,从动轮的间歇运动次数N17主,从动轮齿顶压力角αa1αa2αa1=arccosz1'cosαz1'+2=25
3712αa2=arccosz2'cosαz2'+2=25,37128从动轮顶圆齿间所对应的中心角2γ2γ=πz2'+2(invαa1−invαa2)=5
49129在一次间歇运动中,从动轮转过的角度所包含的齿距数z22510在一次间歇运动中,主动轮仅一个齿时,从动轮转过角度所包含的齿距数K311从动轮相邻两锁止弧间的齿槽数,即在一次间歇运动中,主动轮转过的齿数z1z1=z2+1−K=2312在一尺间歇运动中,从动轮的转角δδ=2πz2'K=21
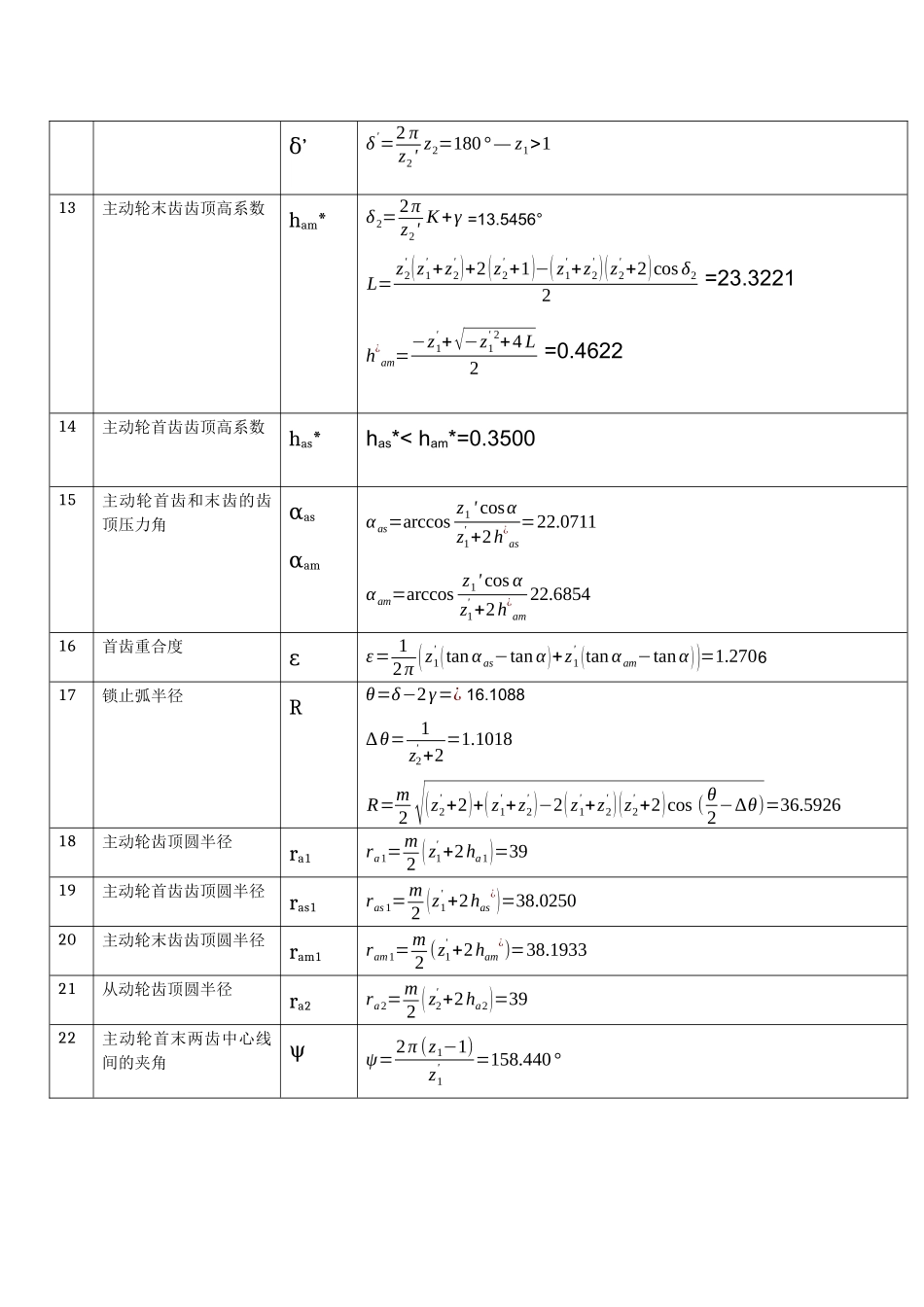
60°—z1=1δ’δ'=2πz2'z2=180°—z1>113主动轮末齿齿顶高系数ham*δ2=2πz2'K+γ=13
5456°L=z2'(z1'+z2')+2(z2'+1)−(z1'+z2')(z2'+2)cosδ22=23
3221h¿am=−z1'+√−z1'2+4L2=0
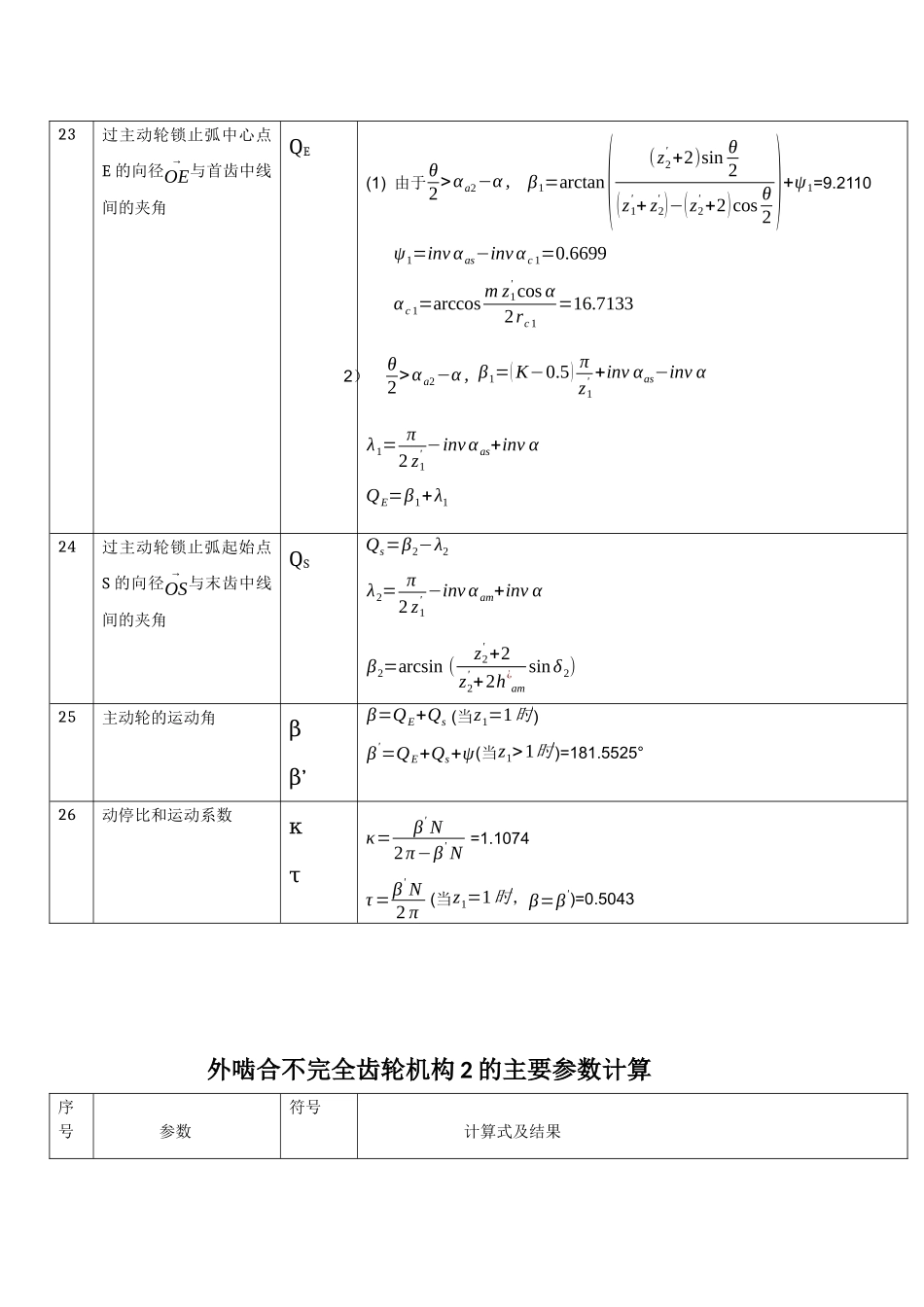
462214主动轮首齿齿顶高系数has*has*αa2−α,β1=arctan((z2'+2)sinθ2(z1'+z2')−(z2'+2)cosθ2)+ψ1=9
2110ψ1=invαas−invαc1=0
6699αc1=arccosmz1