1、当您付费下载文档后,您只拥有了使用权限,并不意味着购买了版权,文档只能用于自身使用,不得用于其他商业用途(如 [转卖]进行直接盈利或[编辑后售卖]进行间接盈利)。2、本站所有内容均由合作方或网友上传,本站不对文档的完整性、权威性及其观点立场正确性做任何保证或承诺!文档内容仅供研究参考,付费前请自行鉴别。3、如文档内容存在违规,或者侵犯商业秘密、侵犯著作权等,请点击“违规举报”。
碎片内容
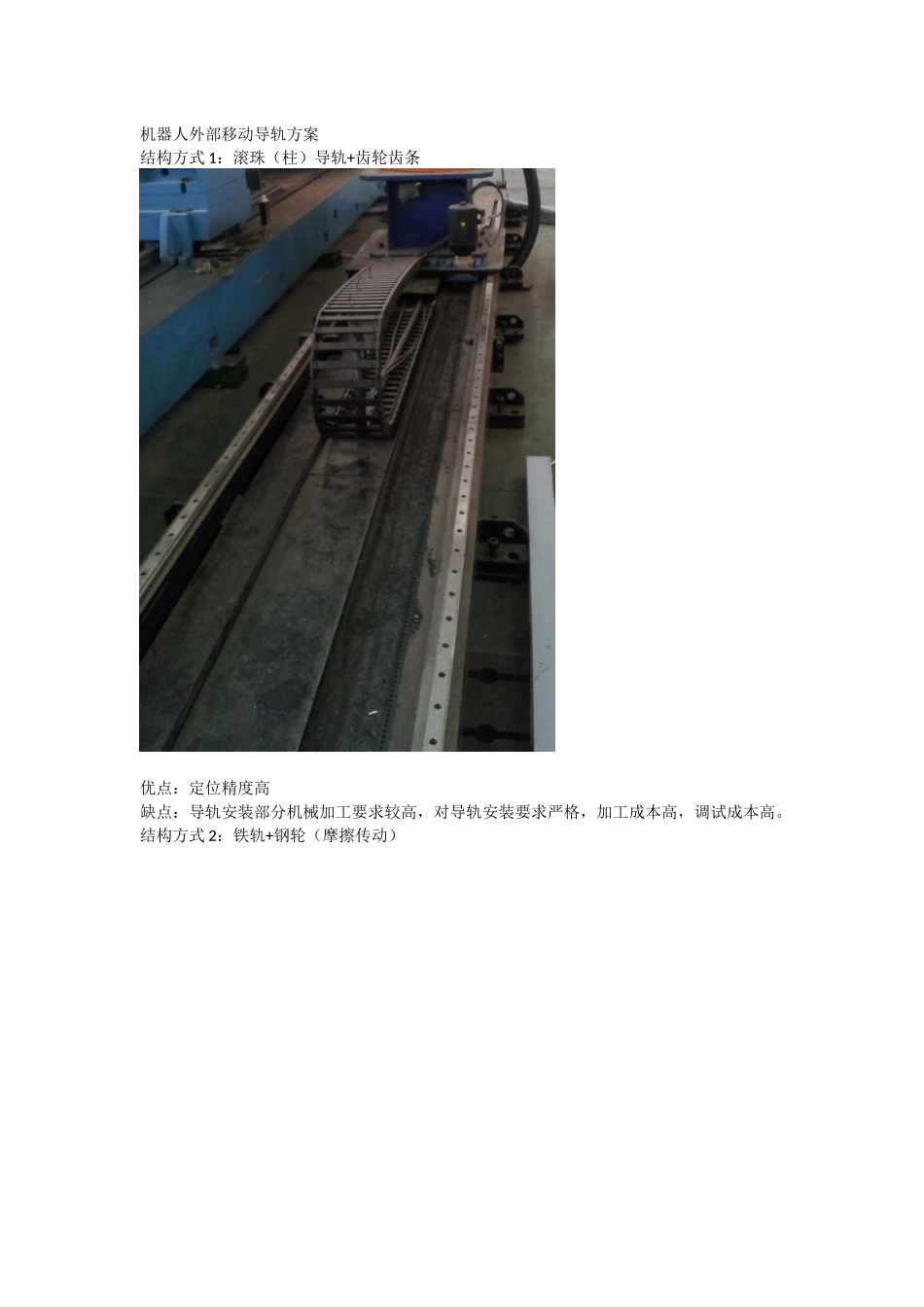
机器人外部移动导轨方案结构方式1:滚珠(柱)导轨+齿轮齿条优点:定位精度高缺点:导轨安装部分机械加工要求较高,对导轨安装要求严格,加工成本高,调试成本高
结构方式2:铁轨+钢轮(摩擦传动)优点:重载,经济性缺点:摩擦传动,打滑现象,需要全闭环控制,不能承受倾覆力矩,精度低
结构方式3:承重滚轮组+U槽导轨+齿轮齿条传动优点:安装调试方便,承重大,成本适中
缺点:精度不高综合三种传动方式,推荐采用第三种方式
1、重复定位可以控制到精度±1mm,调试得当可以提高;2、成本核算,以20米计算,导轨成本为5万,齿条选模3或4,(国产)1800元/m齿轮共4万,框架总重量按照3吨,加工简单,加工费为3万,初步核算成本12万左右
安装形式参考图片:
热爱教学事业,对互联网知识分享很感兴趣