安川伺服安川伺服安川伺服安川伺服PID参数调试流程参数调试流程参数调试流程参数调试流程1
使用USB连接线连接PC与安川伺服驱动器,点击开始→程序→YE_Application→Sigmawin+Englishedition,进入伺服驱动器设置见面
在主界面点击tunning,进入自动调节模式
点击执行按钮,进入惯性调试界面,如图4所示,使用默认设置,点击NEXT,进入下一界面
在图5界面,点击START,再点击NEXT进入下一界面
注意该步由于电机会自行运动距离,所以在运动前,需要确定电机在运动轴的中间位置
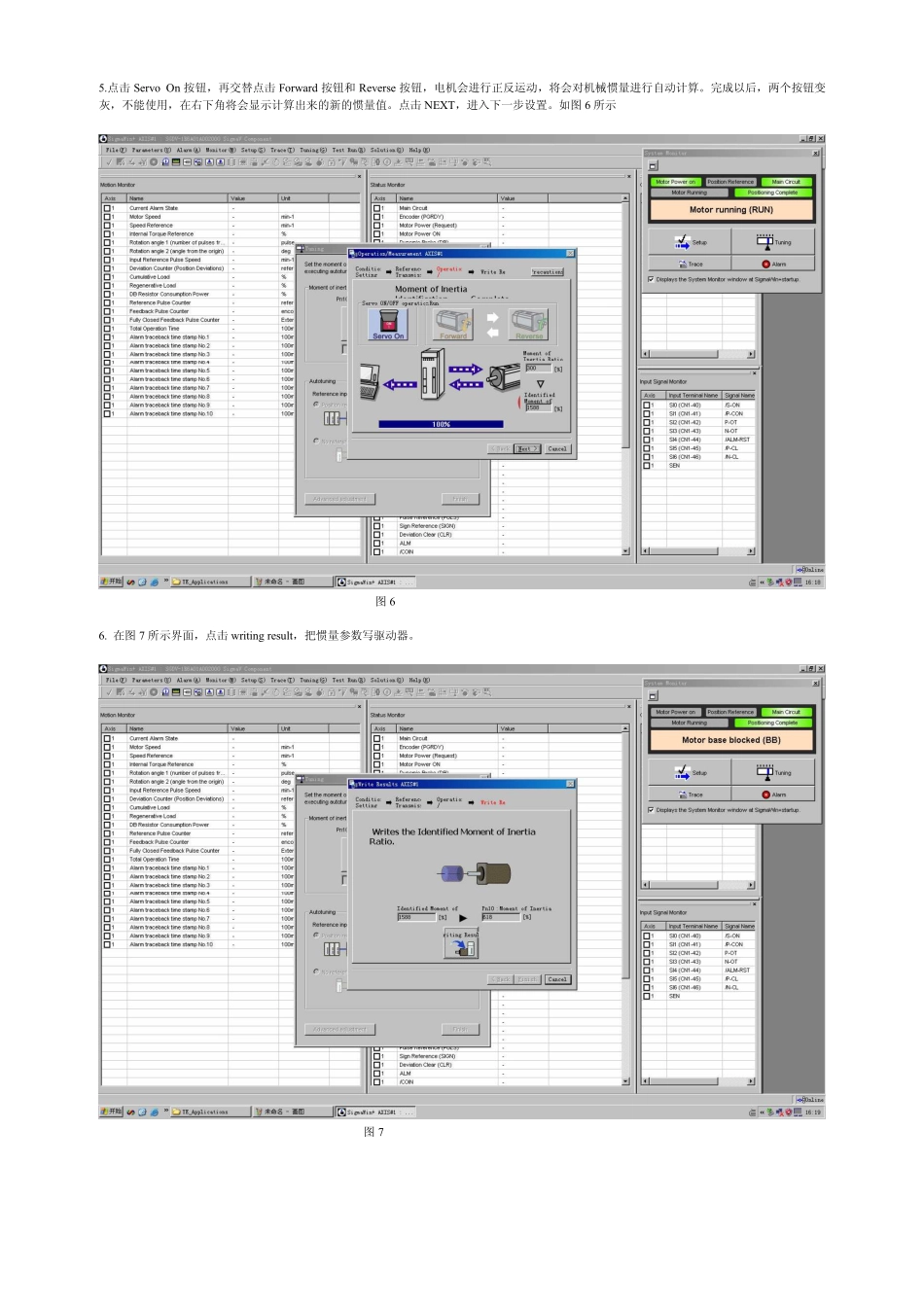
点击ServoOn按钮,再交替点击Forward按钮和Reverse按钮,电机会进行正反运动,将会对机械惯量进行自动计算
完成以后,两个按钮变灰,不能使用,在右下角将会显示计算出来的新的惯量值
点击NEXT,进入下一步设置
如图6所示图66
在图7所示界面,点击writingresult,把惯量参数写驱动器
写入完成,将进入如下界面
如图8所示,点击选择NOreferenceinput选项,再点击AUTOTUNING按钮,进入下一步调试
如图9所示,在distance框下,设置运动范围,默认为24*1000,当确定运行距离足够大的时候保持默认值,当运行距离小于该值的时候,请设置该值到20*1000,并勾选TUNINGPARAMETERS框的选项
点击ServoON,再点击Starttuning,伺服运动系统将在一定距离上来回运动,整过过程电机可能发出震动的噪音,为正常现象,自动调整完成后,点击finish,参数将自动写入驱动器
如图10所示
当参数不满足性能要求的时候,点击parameters→editparameters,从驱动器下载参数显示界面,如图11所示