精密仪器设计第四章作业1.试分析图1中机构的特点①分析机构原理并画出原理图;②分析机构的主要优点
图1微位移机构a)图1
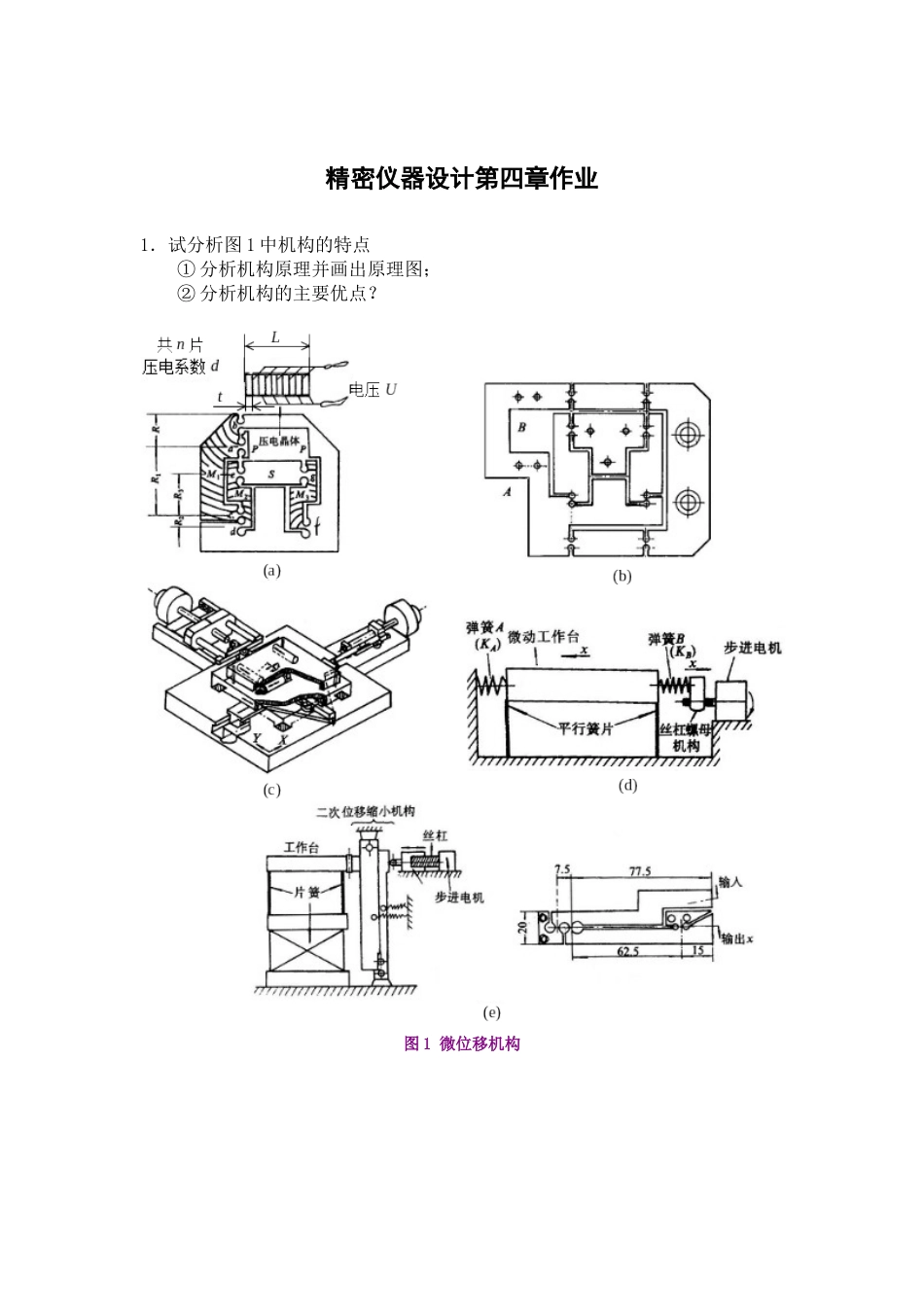
1压电驱动微动台结构原理图机构原理:当压电晶体两端施加电压时,产生微位移,使得杠杆M1上的a点产生一绕支点b转动的微位移,在c点上使杠杆M2绕支点d转动并在e点处拉动工作台S作微量位移
杠杆M3的支点为f,工作台S由两个杠杆M2和M3上的e点和g点支持,原理简图为图1
1这样,压电晶体的微位移便经过杠杆M1和M2放大,其放大比例为RT=(1+R1R)(1+R3R2)优点:由于采用了柔性铰链,故无爬行、无间隙、无轴承噪声、不需要润滑、位移分辨精度高、而且在低频下运行没有内热产生,且结构紧凑,适合各种超精密加工环境,特别是超真空等
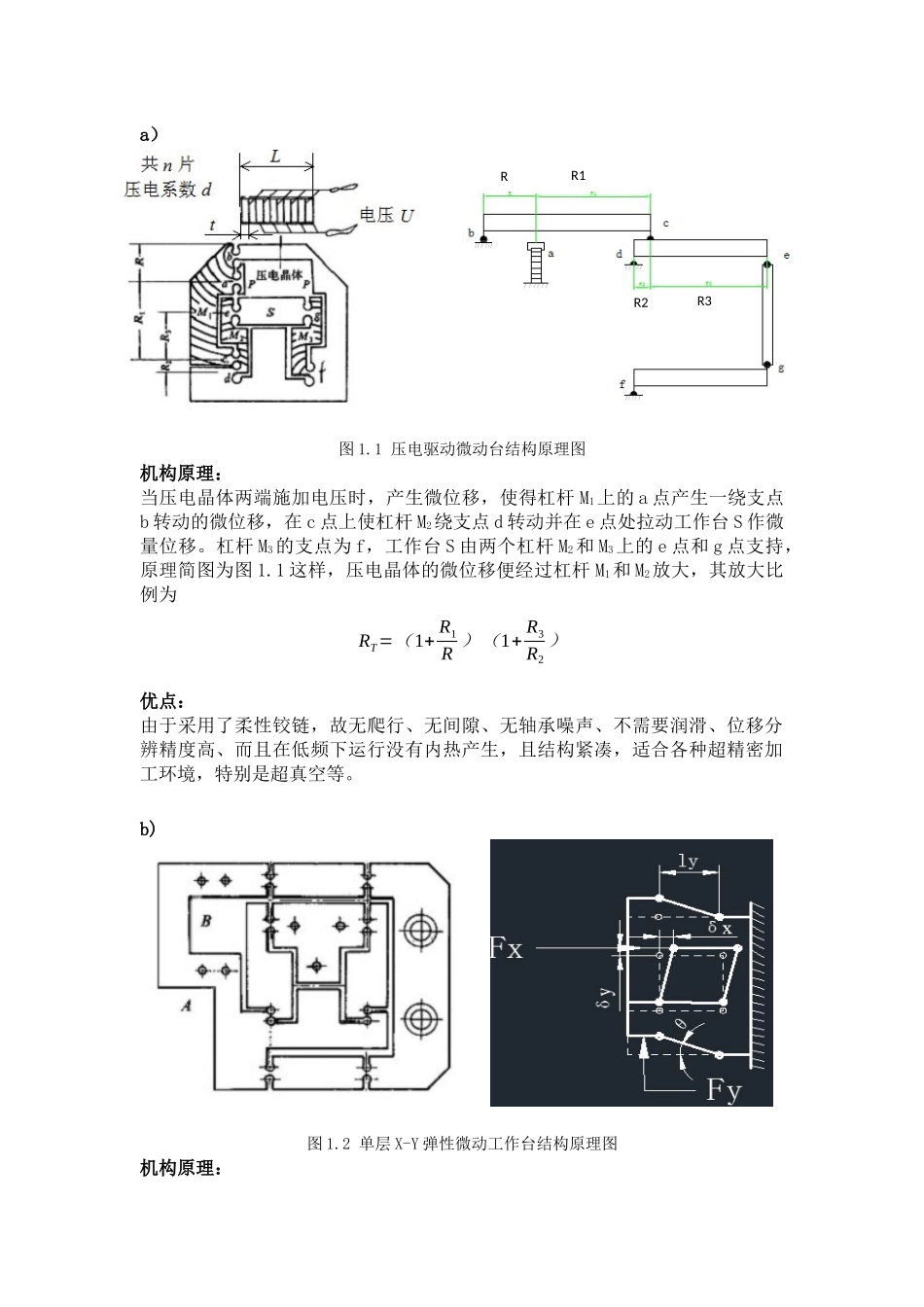
2单层X-Y弹性微动工作台结构原理图机构原理:R3R2R1R它的原理简图见图1
2,他可简化为两个分别进行x、y向运动的平行四连杆机构
在工作台A、B两处安装两个电致伸缩微位移器,当在微位移器上施加电压时,由于四连杆受力而变形,获得两个方向的微位移δx和δy
优点:与(a)机构有相同的优点,而且可以在单层上实现两个方向的微动
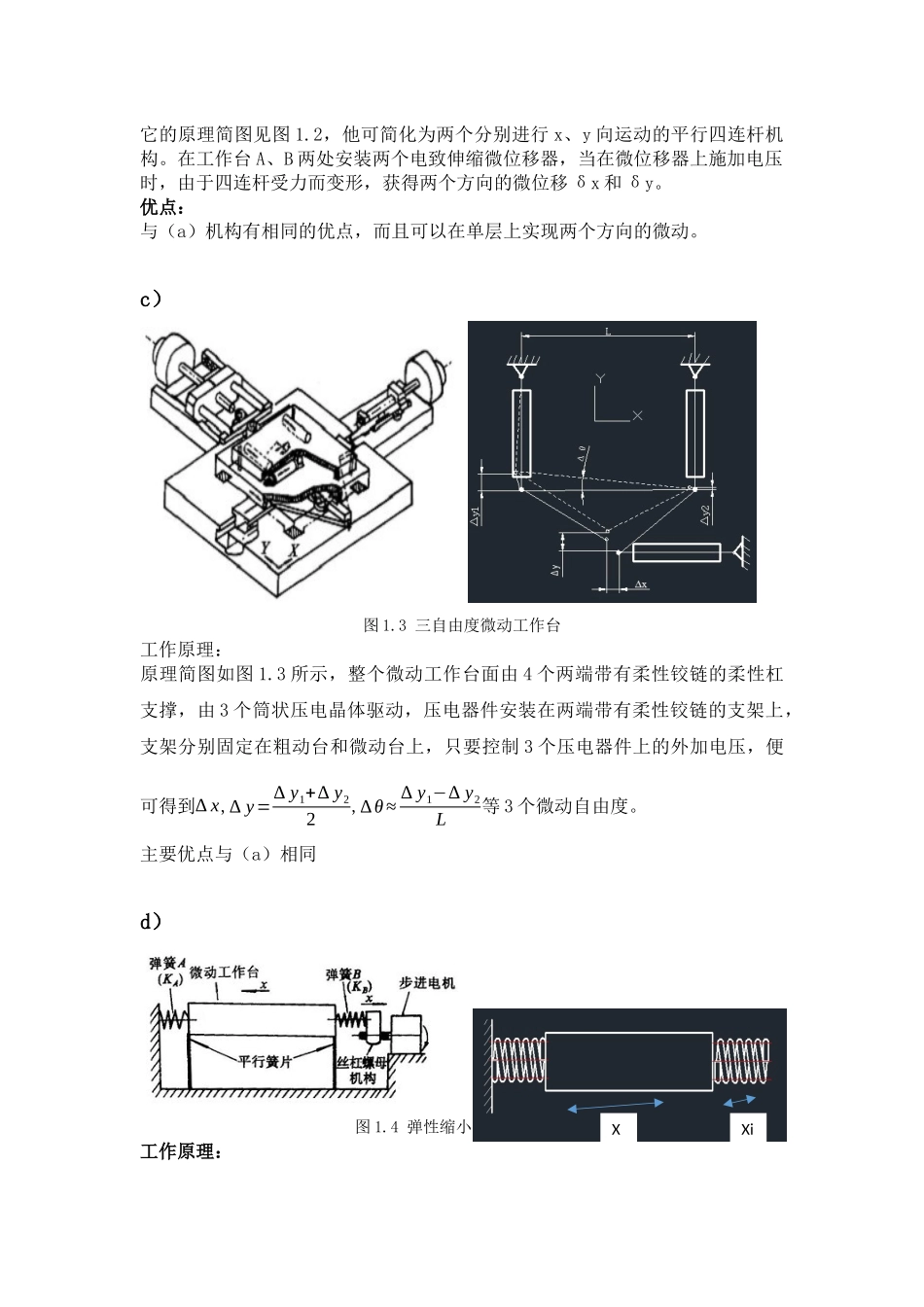
3三自由度微动工作台工作原理:原理简图如图1
3所示,整个微动工作台面由4个两端带有柔性铰链的柔性杠支撑,由3个筒状压电晶体驱动,压电器件安装在两端带有柔性铰链的支架上,支架分别固定在粗动台和微动台上,只要控制3个压电器件上的外加电压,便可得到∆x,∆y=∆y1+∆y22,∆θ≈∆y1−∆y2L等3个微动自由度
主要优点与(a)相同d)图1
4弹性缩小微动台原理图工作原理:XiX若弹簧A、B的刚度分别为KA、KB,输入位移为Xi,则微动台的位移X为x=xiKAKA+KB如果KB≫KA,则工作台的位移x相对于输入位移xi就被大大地缩小了
优点:结构简单e)图1
5微动机构原理图工作原理:如图