收稿日期:2007-06-20基金项目:山东省优秀中青年科学家科研奖励基金项目(03BS149)作者简介:纪晴(1983-),女,山东德州人,山东建筑大学在读硕士,主要研究领域为嵌入式系统、无线传感网络等
文章编号:1673-7644(2007)04-0355-05移动机器人全覆盖路径规划算法综述纪晴,段培永,李连防,王海鹏(山东建筑大学信息与电气工程学院,山东济南250101)摘要:各种应用型移动机器人的设计是目前研究的焦点,它具有广阔的科研价值和市场前景,而路径规划技术是其中关键技术之一
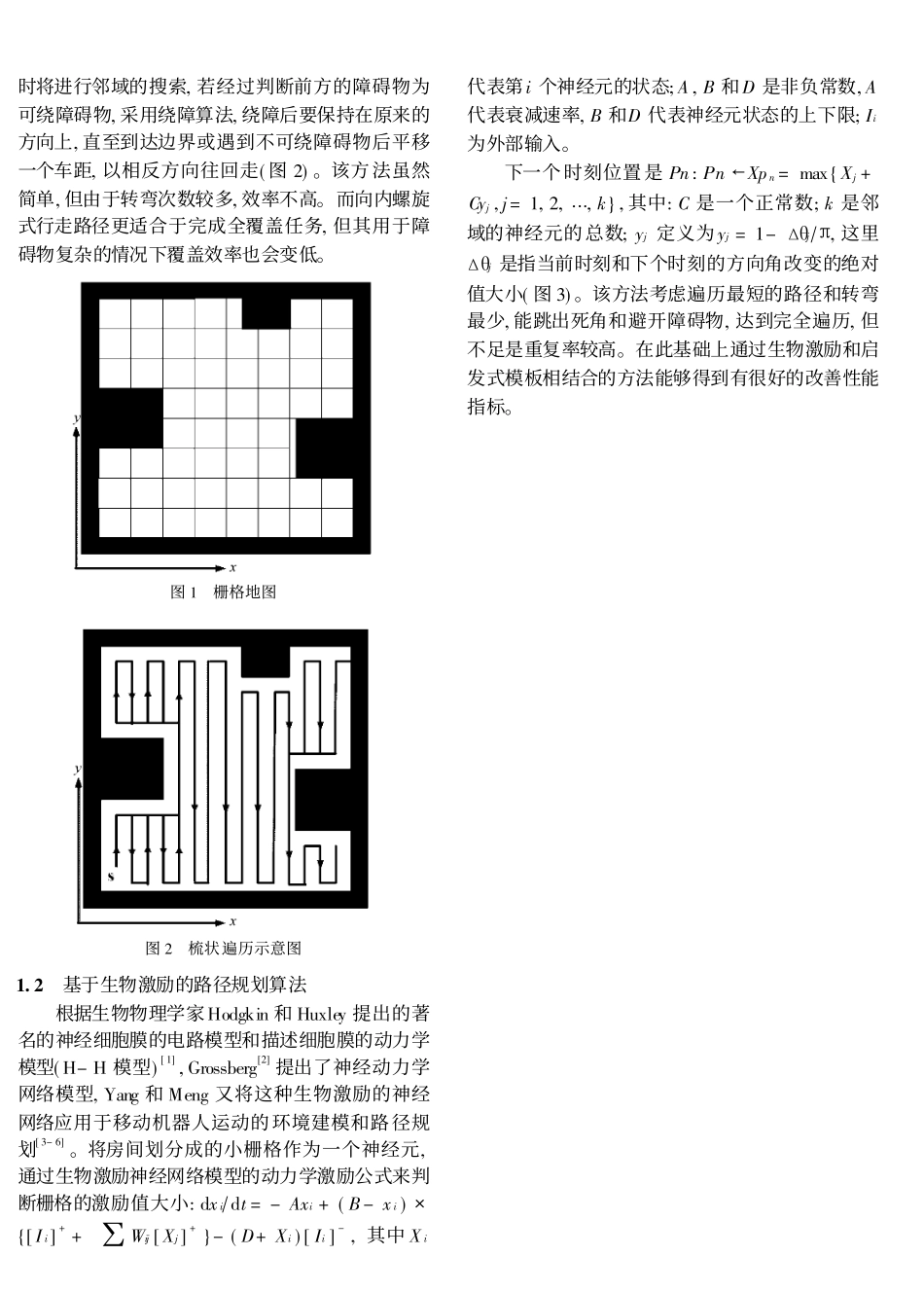
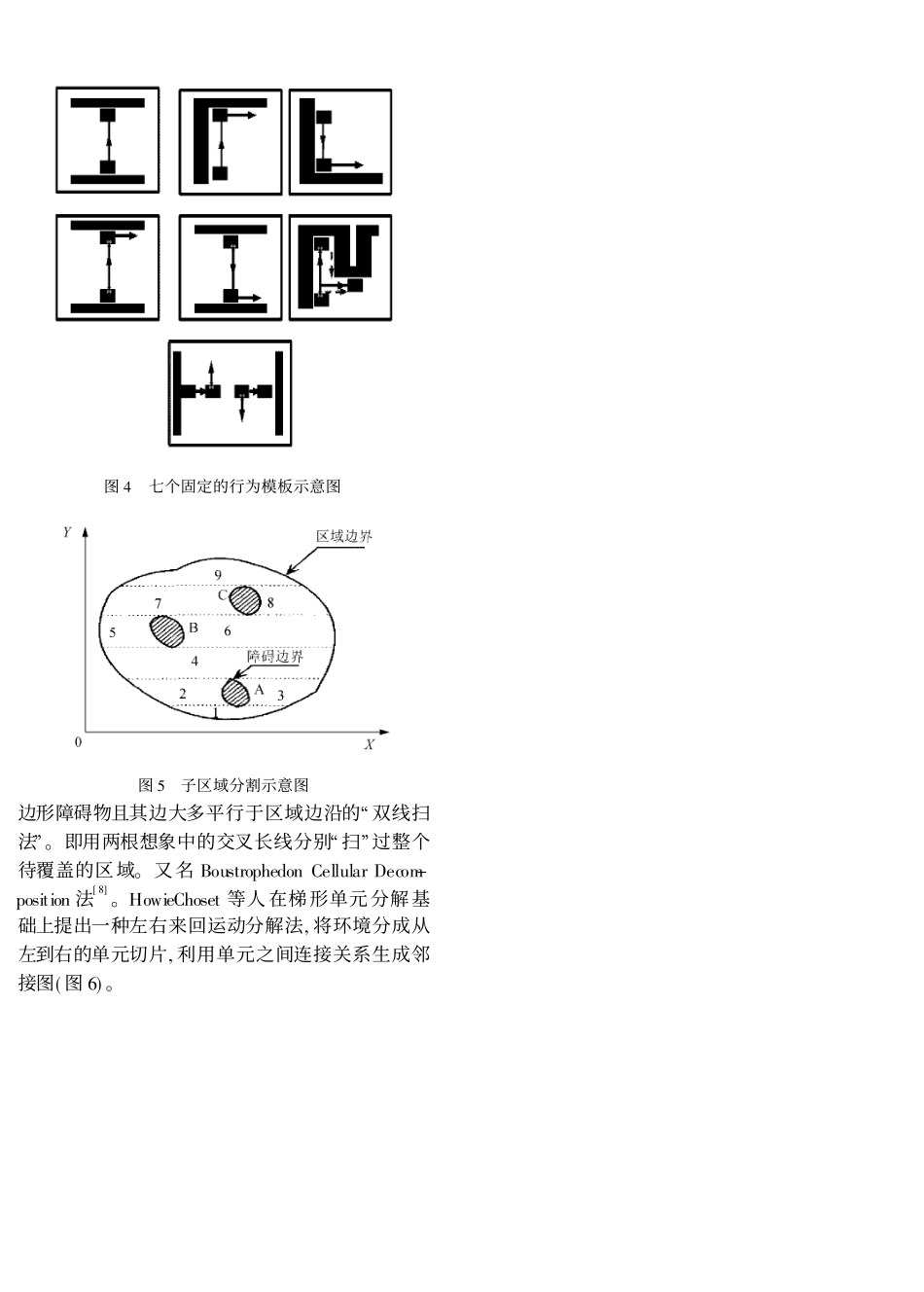
本文系统总结了当前全覆盖路径规划算法的主要研究成果,并在覆盖效率、算法实现难易等指标方面进行比较剖析,探讨了各种算法的优势和不足
最后,提出进一步研究的方向
关键词:移动机器人;全覆盖路径规划;栅格;子区域中图分类号:TP24�����文献标识码:AOverviewofCCPPalgorithmsformobilerobotsJIQing,DUANPe-iyong,LILian-fang,etal
(SchoolofElectricalEngineering,ShandongJianzhuUniversity,Jinan250101,China)Abstract:Nowadays,manycountriesarefocusingontheresearchofvariouskindsofmobilerobotsbecauseoftheirrichvalueonscientificresearchandwideforegroundonmarket
Thepathplanningalgorithmisoneofthekeytechnologiesusedinmobilerobotdesign
Inthispaper,themainachievementsonthealgorithmresea