文章编号:1004-132�(2001)12-1348-04斜拉桥爬缆机构的研制张家梁高级工程师张家梁吕恬生王钧功王殿臣摘要:研制高速度、大负荷的爬缆机构,是实现斜拉桥缆索维护作业机器人化的关键,对于桥梁安全、美观具有重要意义
针对不同的工况,研制了2类爬缆机构的工程化样机
经过实验室多次试验后,在上海徐浦大桥、南浦大桥上成功地进行了现场试验,结果表明2类爬缆机构都能在斜拉桥缆索上实现安全高效的爬升作业
关键词:机器人;爬缆机构;缆索;斜拉桥中图分类号:TP242文献标识码:A收稿日期:2000—01—03基金项目:国家863高技术研究发展计划资助项目(863-512-9803-10);上海市科委科技发展基金资助项目(985511013)斜拉桥是最近几十年才兴起的新桥型,到目前为止,缆索涂装、检测和修复等维护作业很少全面开展,其关键是采用吊篮等维护工具不仅效率低,而且安全性差、成本高,迫切需要维护自动化
为此,我们首次提出了缆索维护机器人的新思想[1,2]
纵观国内外各种爬升模型,机构依附于线约束表面上的有直线连续爬升[3]、夹紧蠕动爬升[4,5]、螺旋攀援爬升[6]和吸附爬升等自动方式
其中,螺旋爬升方式有利于减小爬升阻力,但不利于操作机构及必要作业物资的携带
而缆索截面为较小的圆形或近似圆形,真空或磁力吸附其上的爬升方式难于实现
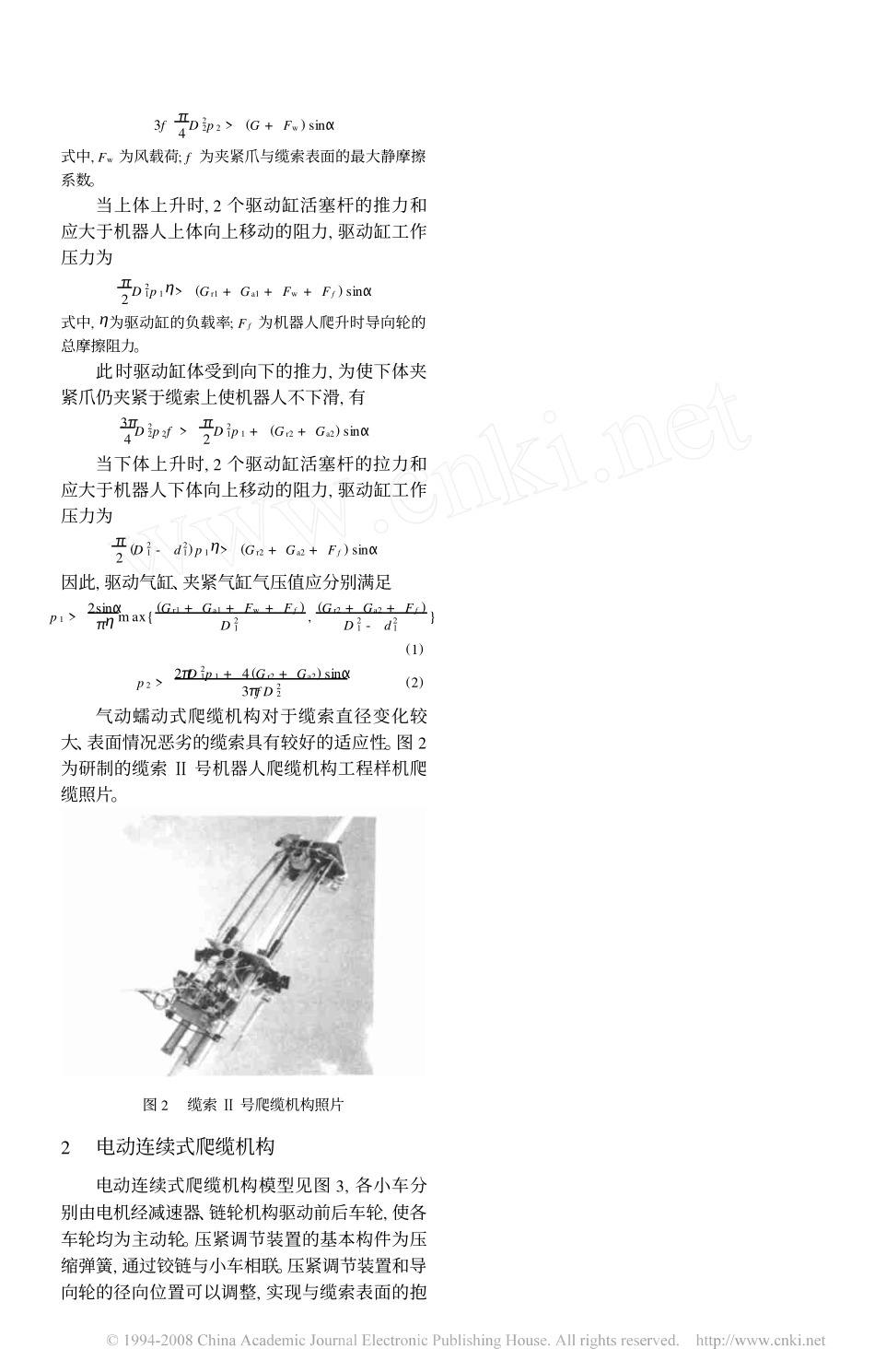
我们针对不同的工况,研制了气动蠕动式爬缆机构和电动连续式爬缆机构
气驱动爬缆机构夹紧力大,对缆索形状的适应能力强;电驱动爬缆机构连续爬升能力下降,更适于缆索涂装等作业
1气动蠕动式爬缆机构采用气动技术,爬缆机构由气缸实现蠕动式夹紧和移动,结构简单、安全方便[7]
如图1所示,驱动气缸缸体固接于下体上,活塞杆通过铰链与上体相联
上体和下体上分别设有圆周均布的3个夹紧气缸和3个导向气缸
驱动夹紧气缸、导向气缸分别使其前端的夹紧爪、导向轮与缆索表面夹