文章编号�����2������������2����2��国外微型管内机器人的发展Ξ张永顺�浙江大学机械电子控制工程研究所�������摘要�本文首先论述了微型管道机器人的发展背景及与传统管内机器人的区别�然后对几种典型常规小管径管道机器人和国外几种典型微驱动式管内微型机器人工作原理对比分析�指出了目前管内微型机器人研究中所面临的主要问题�并对实现微管内机器人实用化的关键技术及研究发展方向进行了探讨�关键词�微驱动器�微型管内机器人中图分类号�×°��文献标识码��1引言在工业
石油天然气等领域中�管道作为一种有效的物料输送手段而得到广泛应用�为了提高这些管道的寿命�防止泄露等事故的发生�管道机器人作为满足高效准确的故障诊断
检测及维修的手段应运而生�其广泛地应用于管道的探伤
焊接等诸多领域�目前�国内外管道机器人的研究成果已经很多�可是对生物体内狭小空间内的检查诊断�工业上热交换器及核电站微小管道空间内的检测
维修尚属空白�并极具吸引力�因此相继成为国内外研究的热点≈�∗���微管道机器人是基于狭小空间内的应用背景提出的�其环境特点是在狭小的管状通道或缝隙内行走进行检测
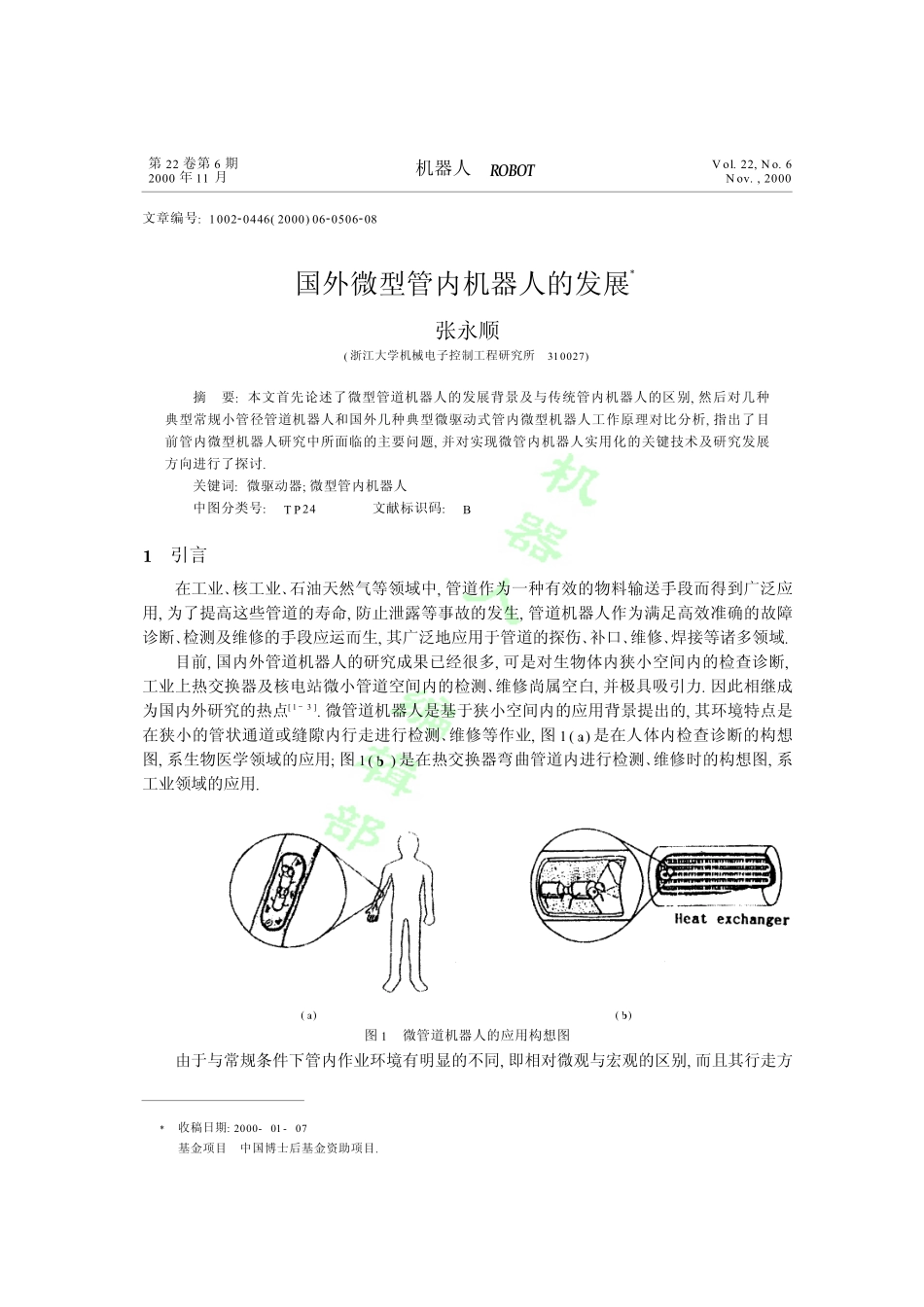
维修等作业�图����是在人体内检查诊断的构想图�系生物医学领域的应用�图����是在热交换器弯曲管道内进行检测
维修时的构想图�系工业领域的应用�������图�微管道机器人的应用构想图由于与常规条件下管内作业环境有明显的不同�即相对微观与宏观的区别�而且其行走方第��卷第�期����年��月机器人ΡΟΒΟΤ∂������������√������Ξ收稿日期�����������基金项目中国博士后基金资助项目�式及结构原理与常规管道机器人不同�因此微管道机器人属于微机器人的范畴�归属于微电子机械系统��∞�≥�的微机器人主要针对生物及医学领域提出的�例如可用来操作人体血球