三、离散PID控制器1
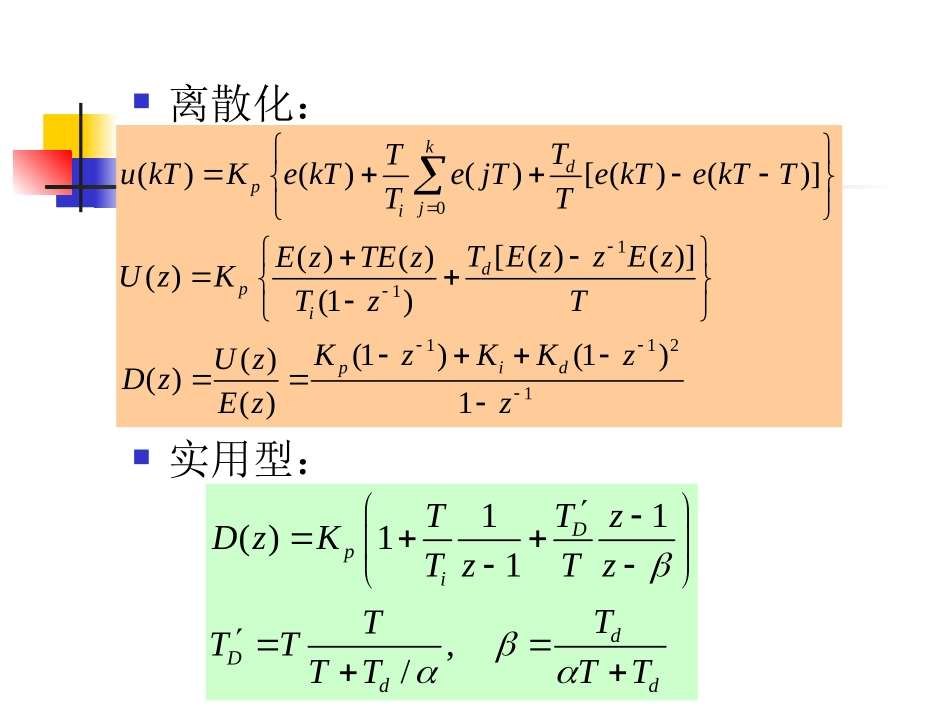
PID控制的基本形式PID控制实质上是一种误差控制时域:021()()[()()]()()[()()]()()()1:(1)1tpdipidpidddidetutKetetdtTTdtEsUsKEsKKsEssKsKKsUsDsEssTsKTTss或者实用型其中:Kp,Ki,Ti,Td分别为:比例系数、积分系数,积分时间常数,微分时间常数,是滤波器时间常数,消除高频的噪声分别称为:比例系数,积分系数,微分系数dT,,dpipdpiTTKKKKKTT离散化:实用型:0111121()()()[()()][()()]()()()(1)(1)(1)()()()1kdpjidpipidTTukTKekTejTekTekTTTTTEzzEzEzTEzUzKTzTKzKKzUzDzEzz11()11,/DpidDddTTzDzKTzTzTTTTTTTT2
PID控制输出形成(1)位置式缺点:隐藏全部的历史数据e(kT-jT)如有问题,故障扰动太大
(2)增量式Δu(kT)=u(kT)-u(kT-T)=KpΔe(kT)+Kie(kT)+Kd[Δe(kT)-Δe(kT-T)]0()()()()()kdjiTTukTKekTejTekTekTTTT其中Δe(kT)=e(kT)-e(kT-T)Δe(kT-T)=e(kT-T)-e(kT-2T)误差的误差(3)速度式(目的均衡采样周期与输出大小,实际工程中很少使用)()()ukTvkTT3
PID系数对系统性能的影响PID控制的性能关键在于合理的选择PID参数即Kp,Ki,Kd(1)Kp增大→速度↑振荡↑超调量↑稳定性↓