第第22章电力拖动系统动力学章电力拖动系统动力学•掌握拖动、电力拖动、负载机械特性、电力拖动系统的转动惯量、飞轮力矩、拖动转矩、阻转矩以及转矩正方向规定的基本概念
•掌握电力拖动系统中研究的主要物理量
•熟练掌握单轴电力拖动系统的运动方程式,并会利用其判断系统的工作状态
•会将多轴电力拖动系统转矩及飞轮力矩等效成单轴系统
•掌握典型的负载机械特性
本章要求:§2
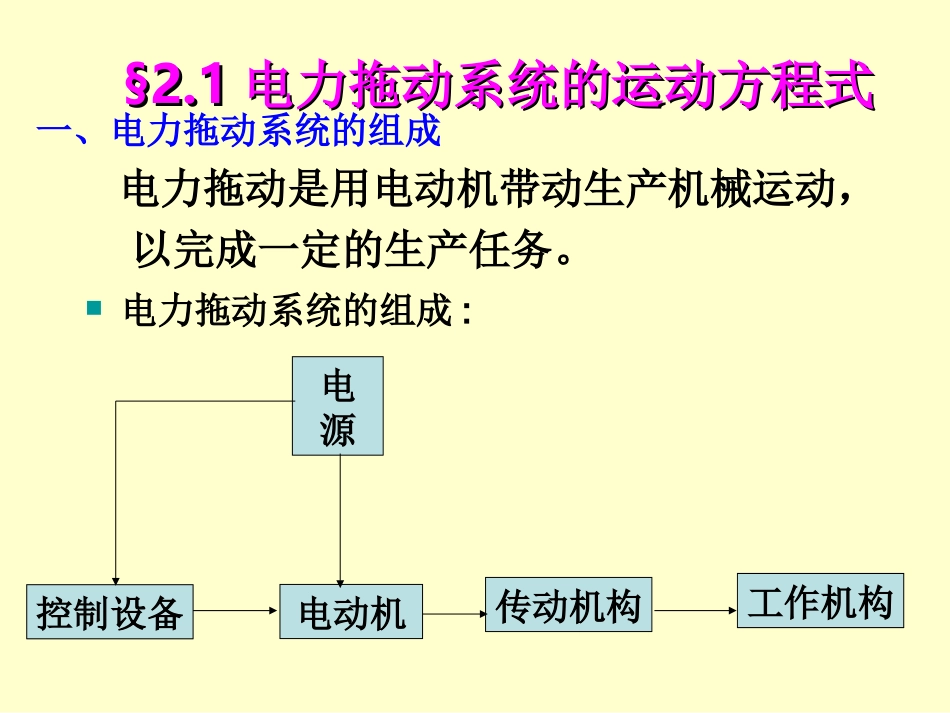
1电力拖动系统的运动方程式电力拖动系统的运动方程式一、电力拖动系统的组成电力拖动是用电动机带动生产机械运动,以完成一定的生产任务
电力拖动系统的组成:电动机工作机构电源传动机构控制设备二电力拖动系统的运动方程式n电动机生产机械TTFT0TL轴Tn单轴电力拖动系统的运动方程以电动机的轴为研究对象,电动机运行时的轴受力如图示
FLTTT0电力拖动系统正方向的规定:电力拖动系统正方向的规定:先规定转速先规定转速nn的正方向,的正方向,然后规定然后规定::电磁转矩的正方向电磁转矩的正方向与与nn的正方向相同,负载转矩的正方向相同,负载转矩的正方向与的正方向与nn的正方向相反
的正方向相反
电动机运行时的轴受力如图示,由力学定律可知,其必须遵守下列方程式:•轴TLLTnT:电磁转矩;TL:负载转矩,N
mJ:电动机轴上的总转动惯量,kg
m2:电动机角速度,rad/s在工程计算中,常用n代替表示系统速度,用飞轮力矩GD2代替J表示系统机械惯性dtdJTTL功率平衡方程得出功率平衡方程=2n/60•M:系统转动部分的质量,Kg•G:系统转动部分的重量,N:系统转动部分的转动半径,m•D:系统转动部分的转动直径,m•g:重力加速度=9
8m/sgGDDgGmJ42)(222所以:•T-TL=0•T-TL>0•T-TL