个人收集整理仅供参考学习仿生机械螃蟹的设计机械创新设计专业:机械设计制造及自动化班级:07机制(2)班姓名:邹彦飞学号:200701020002个人收集整理仅供参考学习仿生机器蟹的设计方案一、仿生机器蟹的原理方案构思和拟定螃蟹以其独特的横向行走方式而标新立异于动物界,从而备受注目
我正是捕捉到这一点,与仿生机械的创新设计联系起来,拟定做一个具有仿生功能的机器蟹
此机器蟹首先必须仿螃蟹的横向行走,即也必须使其大腿能够抬起,而小腿能够向大腿所指方向迈出,当其脚落地时能够抓住地面,通过运动带动整个身体向一侧行进
联想到曲柄摇杆机构,利用其在曲柄旋转时摇杆在两个极限位置摆动这一特性,恰好仿似螃蟹小腿的摆动
蟹有八条腿,我采用了八个经过改动后的曲柄摇杆机构来模拟
行走时四条腿着地作为支撑,并抓地向后运动而另外四条腿抬起,向前运动,当抬起运动的四条腿伸到前面最远时着地,此时抓地的四条腿运动到向后的极限处并抬起
以此循环往复,从而实现了蟹的横向行走
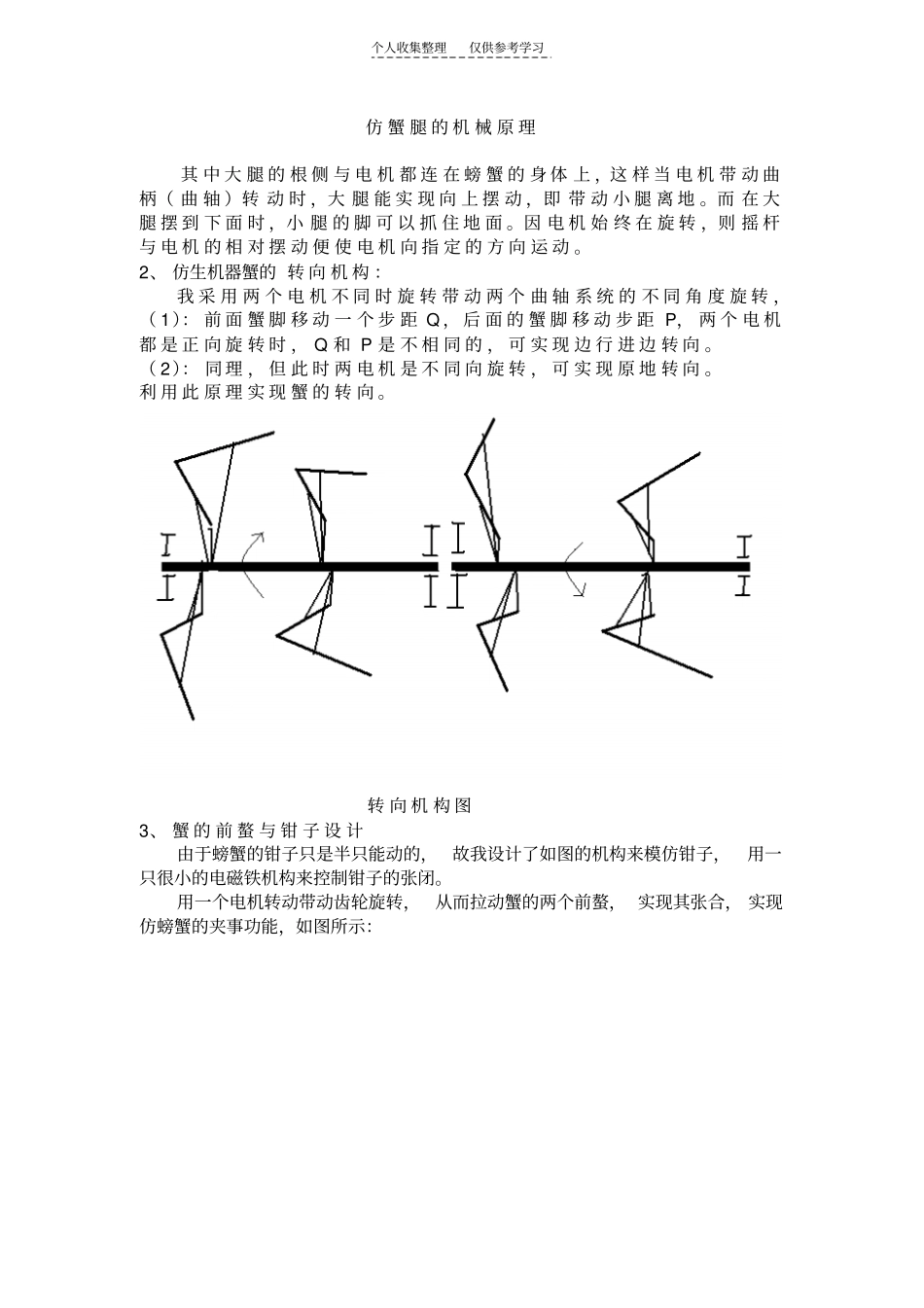
蟹遇到障碍是可以转向的,但并不象其他动物一样能立即转开,而是不断的转动很小的角度,做一个类似弧线的运动
采用两个电机不同向旋转带动两个曲柄摇杆系统运动,从而带动身体在纵向缓慢挪动
蟹的两个前螯能够一张一合来夹起食物,我通过一个电机拉动仿生机器蟹的两个前螯以实现其收拢与张开
二、仿生机器蟹的原理方案初定1
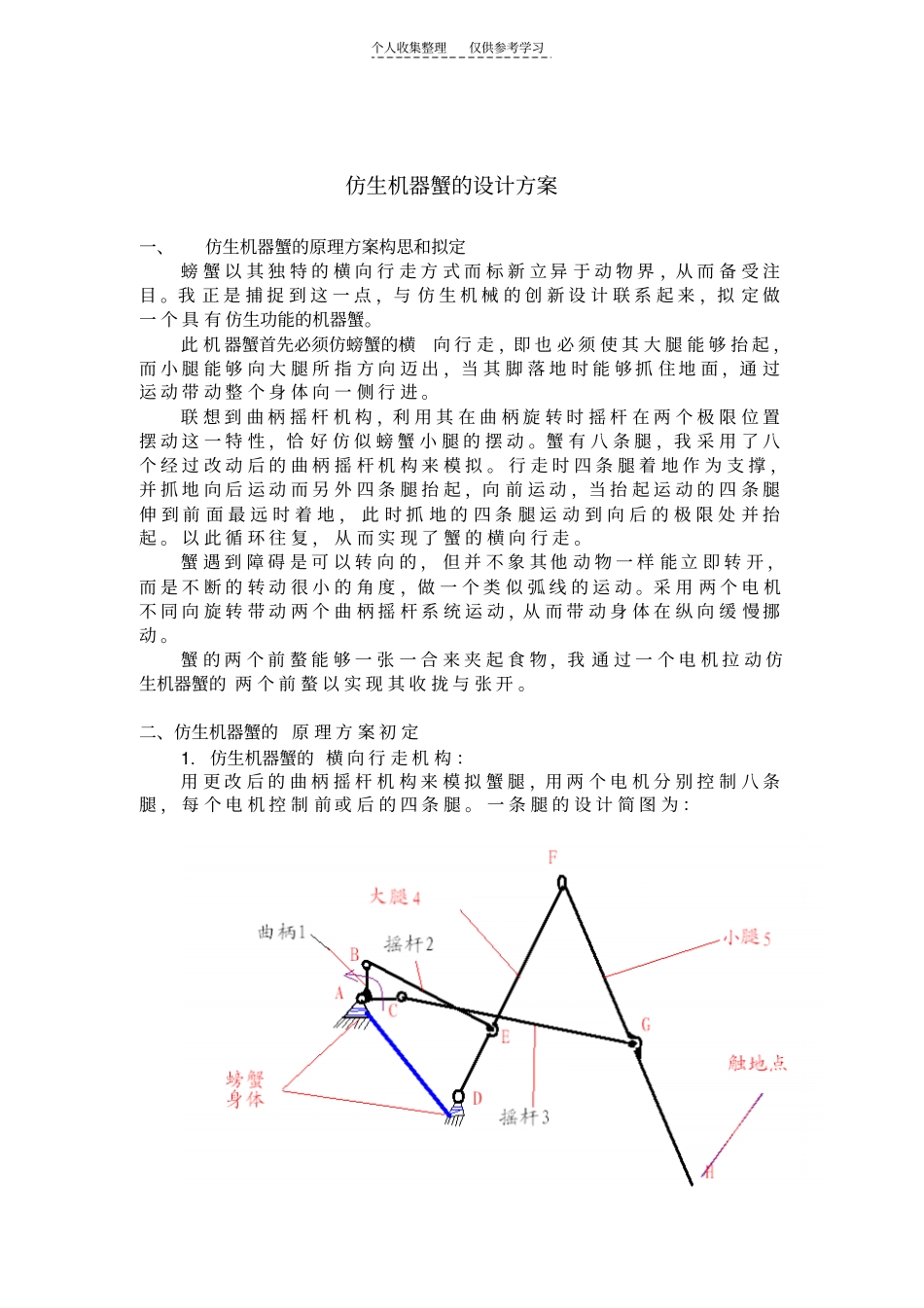
仿生机器蟹的横向行走机构:用更改后的曲柄摇杆机构来模拟蟹腿,用两个电机分别控制八条腿,每个电机控制前或后的四条腿
一条腿的设计简图为:个人收集整理仅供参考学习仿蟹腿的机械原理其中大腿的根侧与电机都连在螃蟹的身体上,这样当电机带动曲柄(曲轴)转动时,大腿能实现向上摆动,即带动小腿离地
而在大腿摆到下面时,小腿的脚可以抓住地面
因电机始终在旋转,则摇杆与电机的相对摆动便使电机向指定的方向运动
2、仿生机器蟹的转向机构:我采用两个电机不同时旋转带动