机构运动简图的测绘和分析一
掌握根据实际机构或模型的结构测绘平面机构运动简图的基本方法;2
掌握平面机构自由度的计算及其验证机构具有确定运动的条件;3
掌握对机构进行分析的方法
设备和工具1
各种机器实物或机构模型;2
自备绘图工具
原理和方法1
测绘原理从运动的观点来看,各种机构都是由构件通过各种运动副的联接所组成,机构运动仅与组成机构的构件数目和构件所组成的运动副的类型、数目、相对位置有关
因此,在测绘机构运动简图时可以撇开构件的复杂外形和运动副的具体构造,而用简略的符号来代表构件和运动副,并按一定比例表示运动副的相对位置,以此表明实际机构的运动特征
正确的机构运动简图应该符合下列条件:(1)机构运动简图上各构件的尺寸、运动副的相对位置及其性质应保持与原机构的特性一致
(2)机构运动简图应保持与原机构的组成特点及运动特点
测绘方法(1)分析机构的运动,认清固定件、原动件和从动件
(2)由原动件出发,按照运动传递的顺序,仔细分析相联接的两构件间的接触方式及相对运动的性质,从而确定构件数目、运动副的类型和数目
(3)合理选择投影面
一般选择机构多数构件的运动平面作为投影面,如果一个投影面不能将机构的运动情况表达清楚,可另行补充辅助投影面
(4)适当确定原动件的位置,选定适当的比例,定出各运动副之间的相对位置,并用构件和运动副的符号绘制机构运动简图
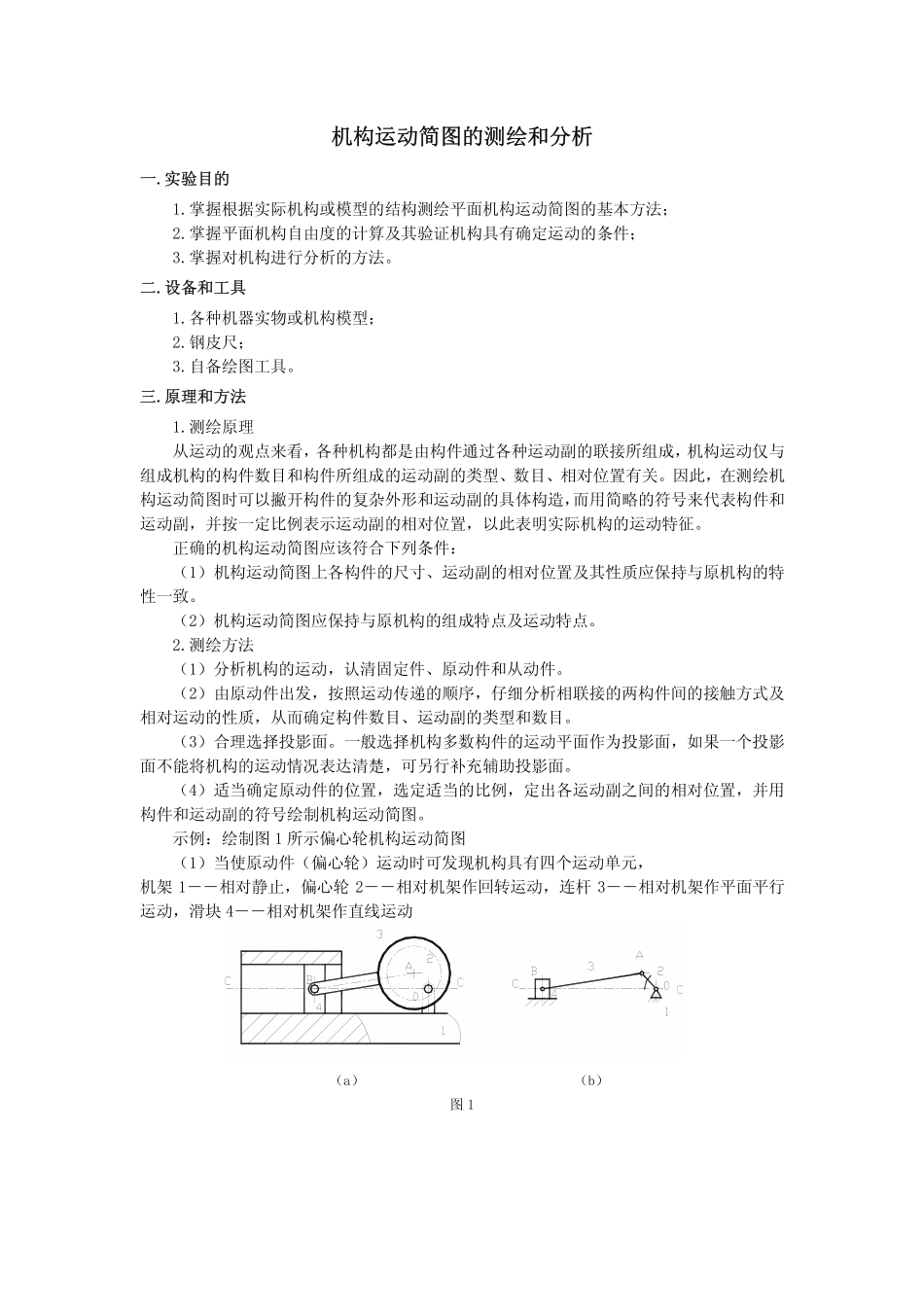
示例:绘制图1所示偏心轮机构运动简图(1)当使原动件(偏心轮)运动时可发现机构具有四个运动单元,机架1――相对静止,偏心轮2――相对机架作回转运动,连杆3――相对机架作平面平行运动,滑块4――相对机架作直线运动(a)(b)图1(2)根据各相互联接的构件间的接触情况可知,全部四个运动副均系低副:构件2相对机架1绕O点回转,组成一个转动副,其轴心在O点;构件3相对构件2绕A点回转,组成第二个转动副,