计算机控制系统有哪些特点
控制规律的实现灵活
控制精度高3
控制效率高4
可集中操作显示5
可实现分机控制与整体优化6
存在着采样延迟2
计算机控制系统有哪些类型
操作指导控制系统2
直接数字控制系统(DDC)2
监督计算机控制系统(SCC)3
分布式控制系统(DCS)3
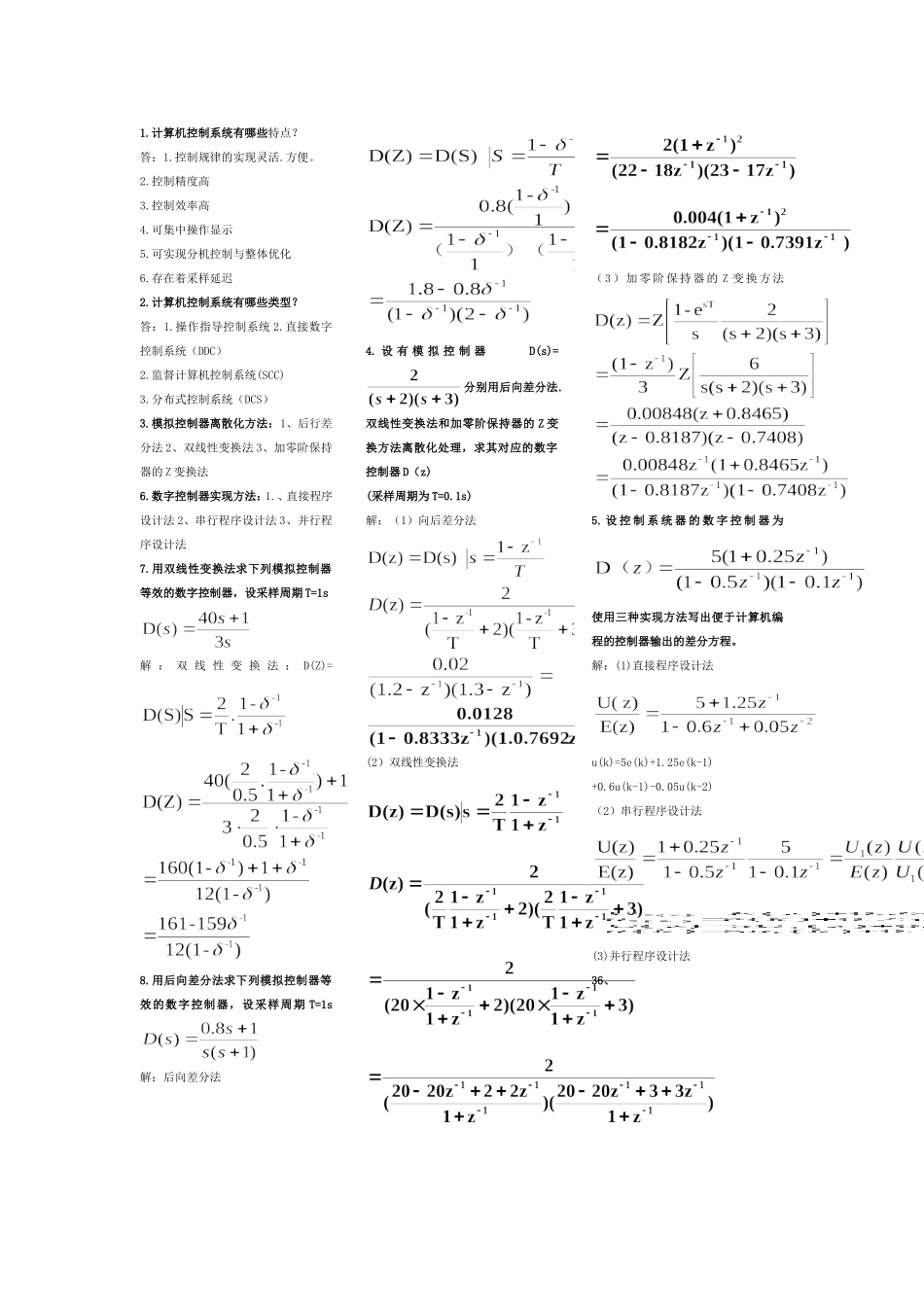
模拟控制器离散化方法:1、后行差分法2、双线性变换法3、加零阶保持器的Z变换法6
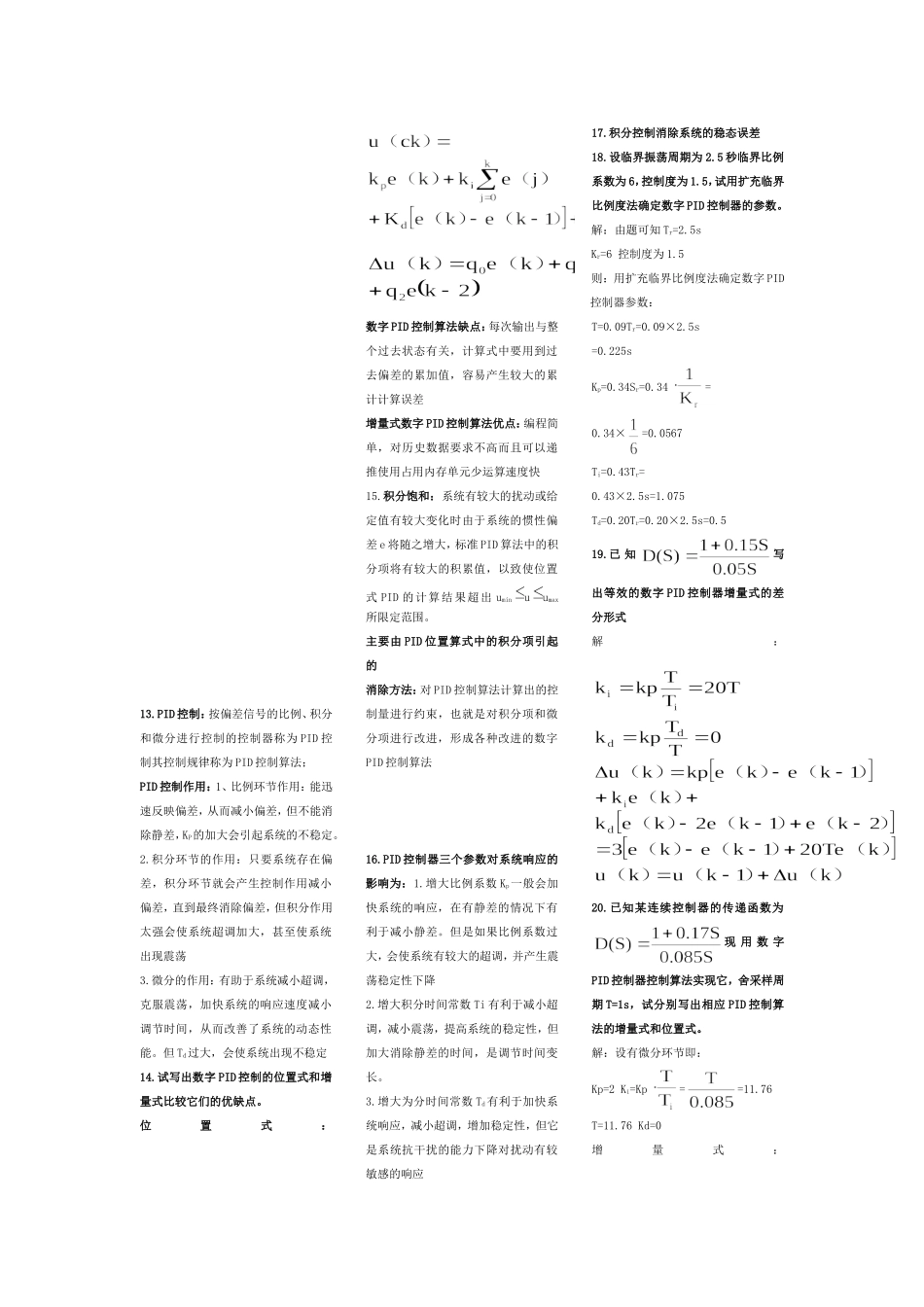
数字控制器实现方法:1
、直接程序设计法2、串行程序设计法3、并行程序设计法7
用双线性变换法求下列模拟控制器等效的数字控制器,设采样周期T=1s解:双线性变换法:D(Z)=8
用后向差分法求下列模拟控制器等效的数字控制器,设采样周期T=1s解:后向差分法4
设有模拟控制器D(s)=分别用后向差分法
双线性变换法和加零阶保持器的Z变换方法离散化处理,求其对应的数字控制器D(z)(采样周期为T=0
1s)解:(1)向后差分法(2)双线性变换法(3)加零阶保持器的Z变换方法5
设控制系统器的数字控制器为使用三种实现方法写出便于计算机编程的控制器输出的差分方程
解:(1)直接程序设计法u(k)=5e(k)+1
25e(k-1)+0
6u(k-1)-0
05u(k-2)(2)串行程序设计法(3)并行程序设计法36、设被测温度变化范围为0--1200度,如果要求误差不超过0
4度,应选用分辨率为多少位A/D转换器
解:D0==0
000333N1log2(1+)=log2(1+)11
5选分辨率为12位的A/D转化器9
已知某模拟控制器的传递函数,设采样周期T=0
25s,使用双线性变换法求出相应的等效数字控制器D(z)及输出的差分方程
已知某模拟控制器的传递函数为D(S)=设采样周期T=1试用零极点匹配法求出相应的等效数字控制器D(z)及输出的差分方程
11已知某数字控制器为试给出并行程序设计