自动避障机器人课题自动避障机器人单元5学科信息技术年级学习目标1
认识红外避障传感器2
编写避障机器人程序3
模拟仿真机器人避障4
搭建与调试避障机器人重点编写避障机器人程序难点搭建与调试避障机器人教学过程教学环节教师活动学生活动设计意图导入新课要让机器人避开障碍物,首先要给机器人装上“眼睛”,使它具有能感知障碍物的“器官”;然后设计避障程序,让机器人根据检测到的情况选择前进或者转弯
女:给机器装上“眼睛”—红外线传感器,机器人检测到障碍物的时候,就可以想办法避开了
你是怎么做到的呢
认真听讲,仔细思考,交流分享自己的看法
激发学生兴趣,导入课题
讲授新课一、认识红外避障传感器红外避障传感器相当于机器人的“眼镜”,它是由一个红外线发射管和一个红外线接受管组成的,如下图所示,它的主要功能是检测红外线发射管的前方是否有物体存在
介绍了红外避障传感器的组成:红外线接受管、红外线发射管、可调电阻、传感器的连接线
同学们,为了然机器人避开前进过程中的障碍物,你们知道红外避障传感器应该安装在哪个地方吗
长见识:当红外线发射管发射出去的红外光遇到物体时会反射给接收管,接收管会把这个信息传输给机器人的微电脑
二、编写避障机器人程序男:我给机器人装上了红爱避障传感器,为什么它还是不会避开障碍物呢
女:因为机器人只是装上了红外避障传感器,却没有把它激活
我们要通过程序,让机器人使用红外避障传感器检测障碍物并告诉他遇到障碍物时应该怎样避开
思考:同学们,你们在走路的时候,是一直睁着眼睛看周围的环境,还是一会儿后,闭着眼睛行走呢
当遇到障碍物的时候,你是怎么做的
给机器人装上红外避障机器人以后,还要让机器人会使用它来检测障碍物
这需要为机器人设计一个检测障碍物的程序,让机器人不停地使用红外避障传感器检测障碍物
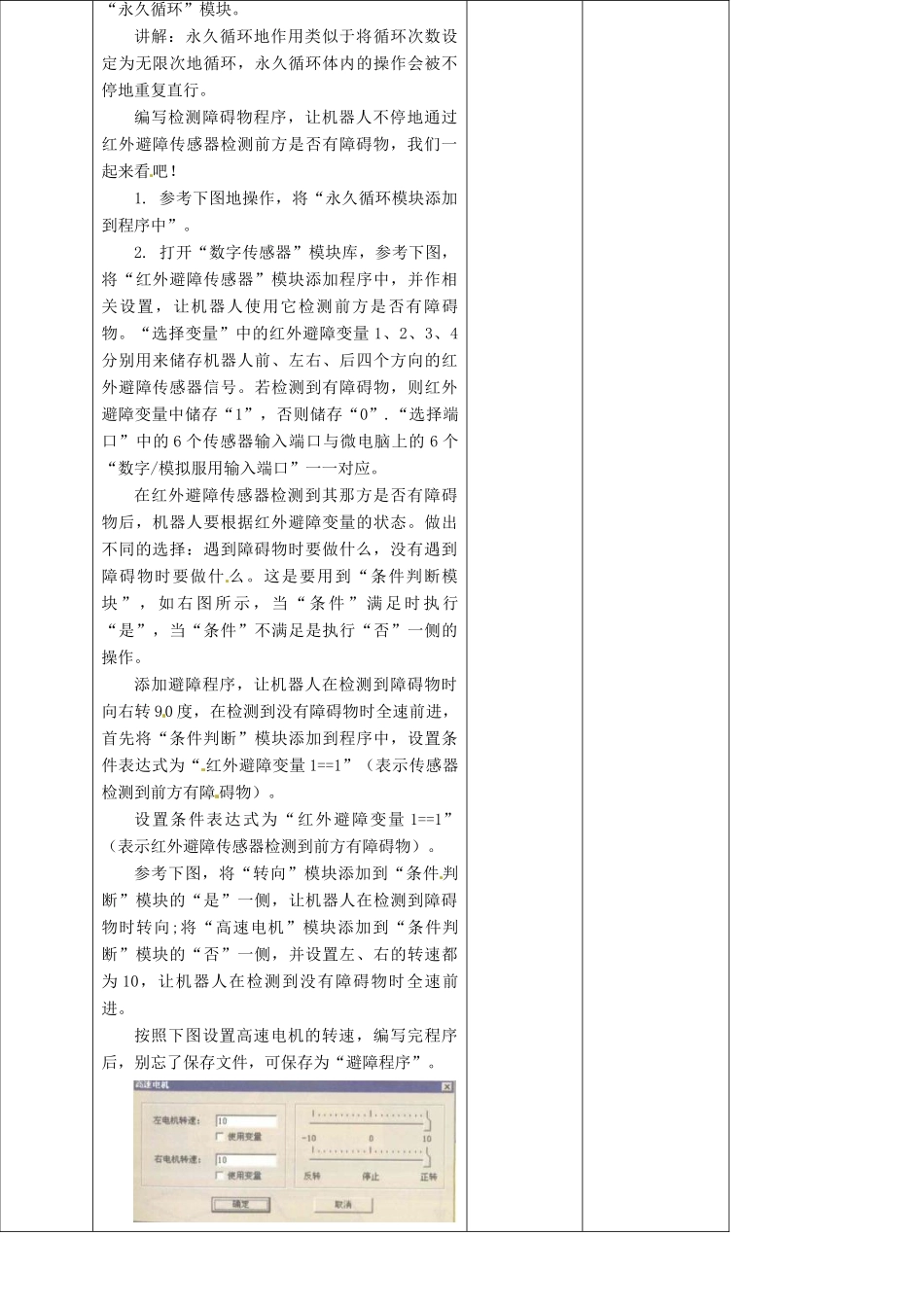
这个程序中除了用到“红外避障传感器”模块以外,还要用到认真听讲、仔细思考,动手操