HarbinInstituteofTechnology大作业设计说明书课程名称:机械原理设计题目:连杆机构设计院系:班级:设计者:学号:指导教师:设计时间:2013-6-13哈尔滨工业大学1
连杆题目(16):如图所示机构,已知机构各构件的尺寸为==100ACCEllmm,==200BCCDllmm,90BCD,构件1的角速度为1=10/wrads,试求构件5的角位移、角速度和角加速度,并对计算结果进行分析
1机构的运动分析AB为原动件,AB转动通过转动导杆机构带动杆BCD转动,BCD转动通过转动导杆机构带动杆DE摆动
哈尔滨工业大学课程设计说明书1
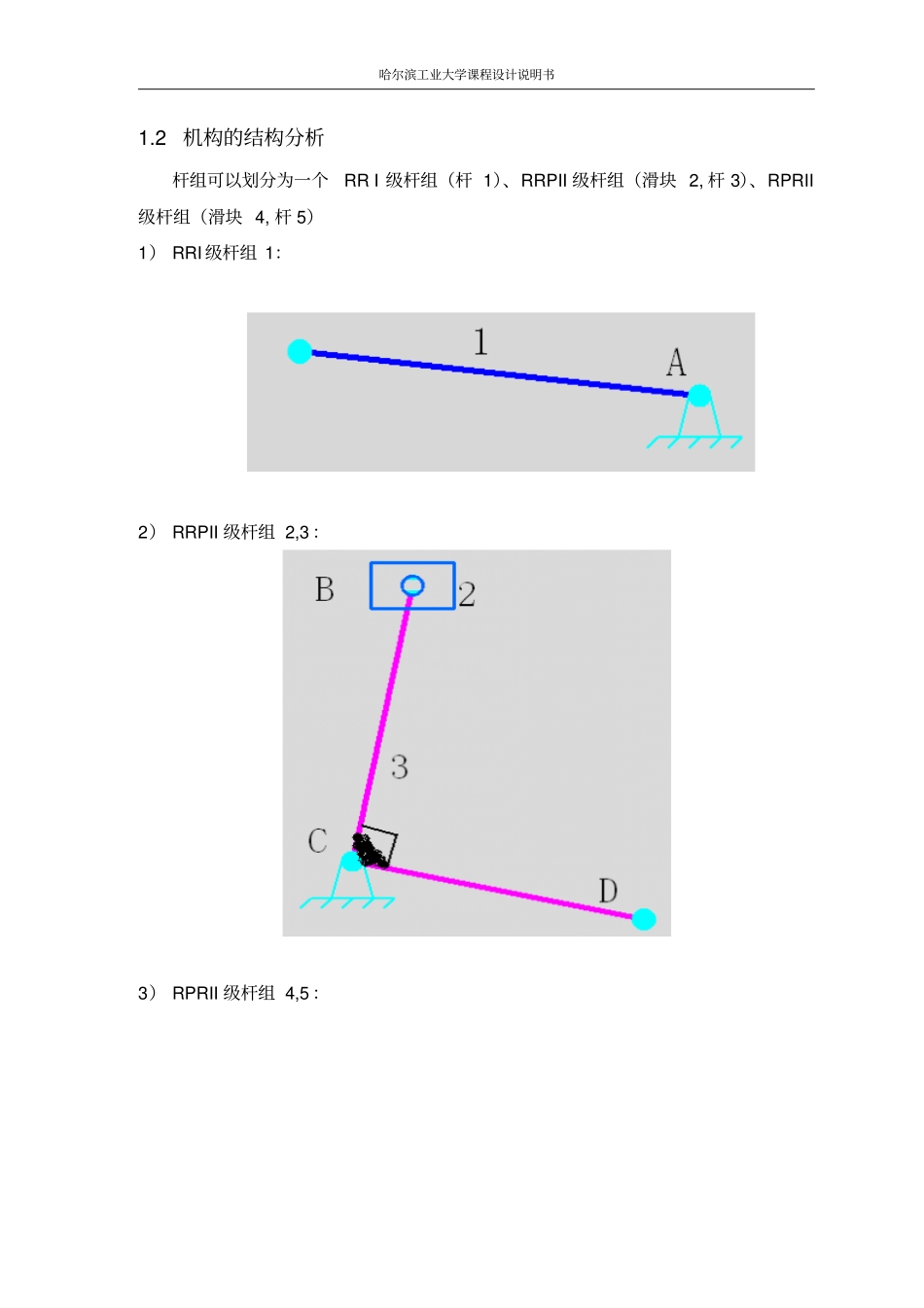
2机构的结构分析杆组可以划分为一个RRI级杆组(杆1)、RRPII级杆组(滑块2,杆3)、RPRII级杆组(滑块4,杆5)1)RRI级杆组1:2)RRPII级杆组2,3:3)RPRII级杆组4,5:哈尔滨工业大学课程设计说明书1
3机构各杆组的运动分析数学模型1)RRI级杆组1:B点位移方程:abab·cos·sinBAabBAabxxlyylB点速度方程:xBxAabababyByAabababvvlSinvvlCosB点加速度方程:22cossinxBxAababAByByAababABaalaal2)RRPII级杆组2,3:以A点为参考点-y-yCosCAabCAabAO(x-x)Sin()0
5abMOCos2=tan()++1bcabMOarcMO+BCbcbclCosxx+BCbcbclSinyy-=BAabsCosxx1xAxCababQvvwsSin哈尔滨工业大学课程设计说明书2=+yAyCababQvvwsCos3=+bcbcabbcbcabQlSinSinlCosCos123-+=ababbcQSinQCoswQ123()+()=-bcbcbcbcsQlCosQlSinvQ224=--2bcabbcbc