前言最近整理了相机成像原理和视差与深度信息相关的资料,然后做成了PPT,以备自己用,也提供给相关的图像、视觉方向的朋友参考
如有误,望海涵并指出
正文图像处理、立体视觉等等方向常常涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系
例如下图:4uoX°pg巧P%也每)图像处理中涉及到以下四个塑%%Vw:世界坐标棗描述相杠位宣单位酮:像素坐标系原点为图像左上角「单位pi迢P:世界坐标系中的一点r即为生活中真更的一点;P:点P在图像中的成像点「在图橡塑标系中的坐标为他刃,在像素坐标系中的坐标为仏V);f:相机焦距「等于
与%的距富寸二Ik-OJIntto:vblog・csdn・net/ohentrcivellir
s久-耳丫耳:相机坐标巍光心为II点卑
-科:图噱坐标系「光1>为图像构建世界坐标系只是为了更好的描述相机的位置在哪里,在双目视觉中一般将世界坐标系原点定在左相机或者右相机或者二者X轴方向的中点
接下来的重点,就是关于这几个坐标系的转换
也就是说,一个现实中的物体是如何在图像中成像的
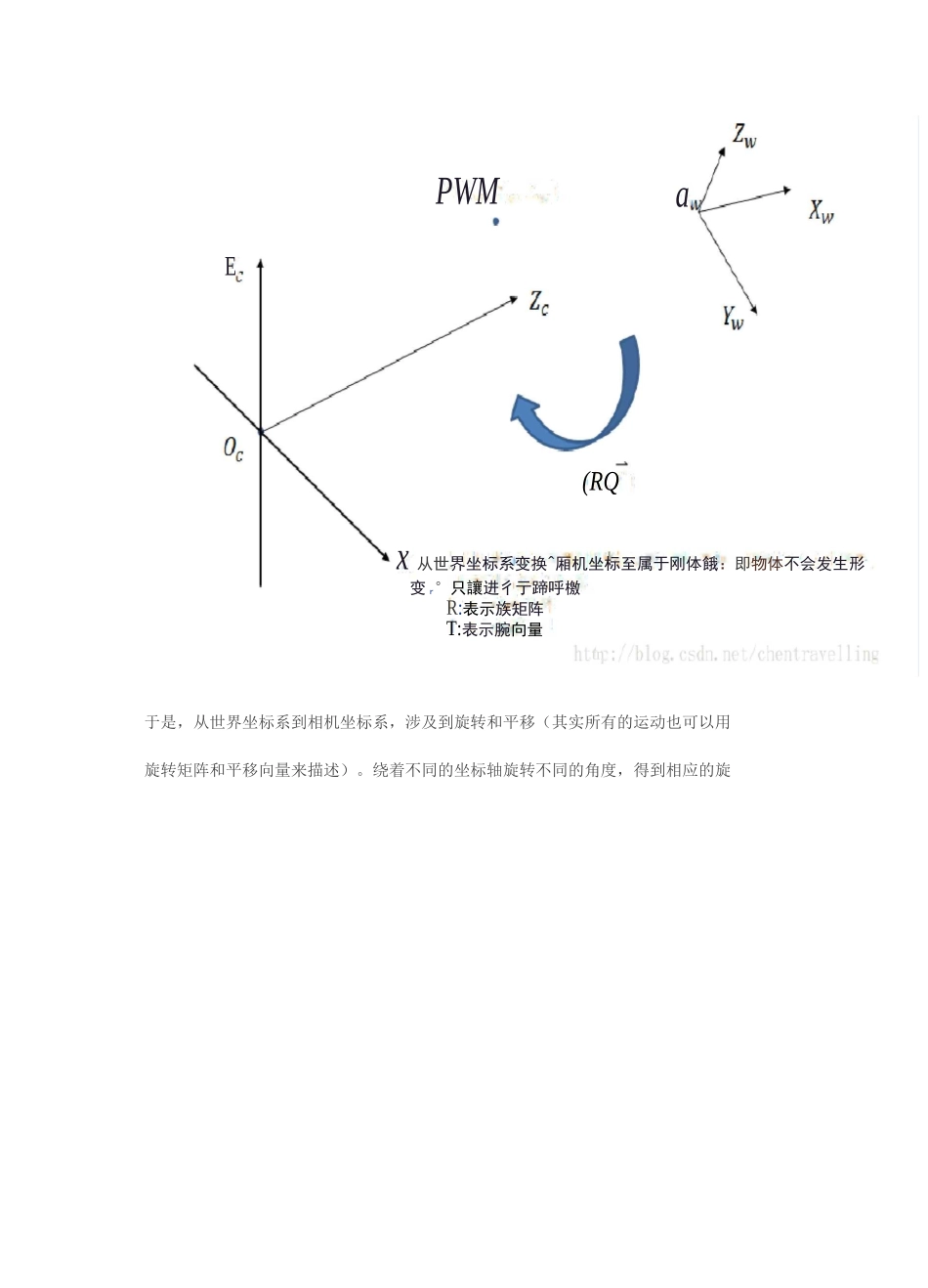
1世界坐标系与相机坐标系aEtn(RQx从世界坐标系变换^厢机坐标至属于刚体餓:即物体不会发生形变r°只讓进彳亍蹄呼檄R:表示族矩阵T:表示腕向量PWM于是,从世界坐标系到相机坐标系,涉及到旋转和平移(其实所有的运动也可以用旋转矩阵和平移向量来描述)
绕着不同的坐标轴旋转不同的角度,得到相应的旋转矩阵,如下图所示:0「sinQR0yyo10局ysvrtyyXyy
n绕Z轴®樹示意卩心3)rx=xcosd—'fSUI&y二x'smO-y'cosG于是可以得到鑼矩阵说=舄地爲同理,缔触y轴濾濟%
,可得到:•L_sincost—suitp'cosq)sin8cos91
2相机坐标系与图像坐标系那么从世界坐标系到相机坐标系的转换关系如下所示:APBOc-ApCO