过程控制系统Matlab/Simulink仿真实验实验一过程控制系统建模⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1实验二PID控制⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯10实验三串级控制⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯27实验四比值控制⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯35实验五解耦控制系统⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯40第1页,共47页实验一过程控制系统建模作业题目一:常见的工业过程动态特性的类型有哪几种
通常的模型都有哪些
在Simulink中建立相应模型,并求单位阶跃响应曲线
答:常见的工业过程动态特性的类型有:无自平衡能力的单容对象特性、有自平衡能力的单容对象特性、有相互影响的多容对象的动态特性、无相互影响的多容对象的动态特性等
通常的模型有一阶惯性模型,二阶模型等
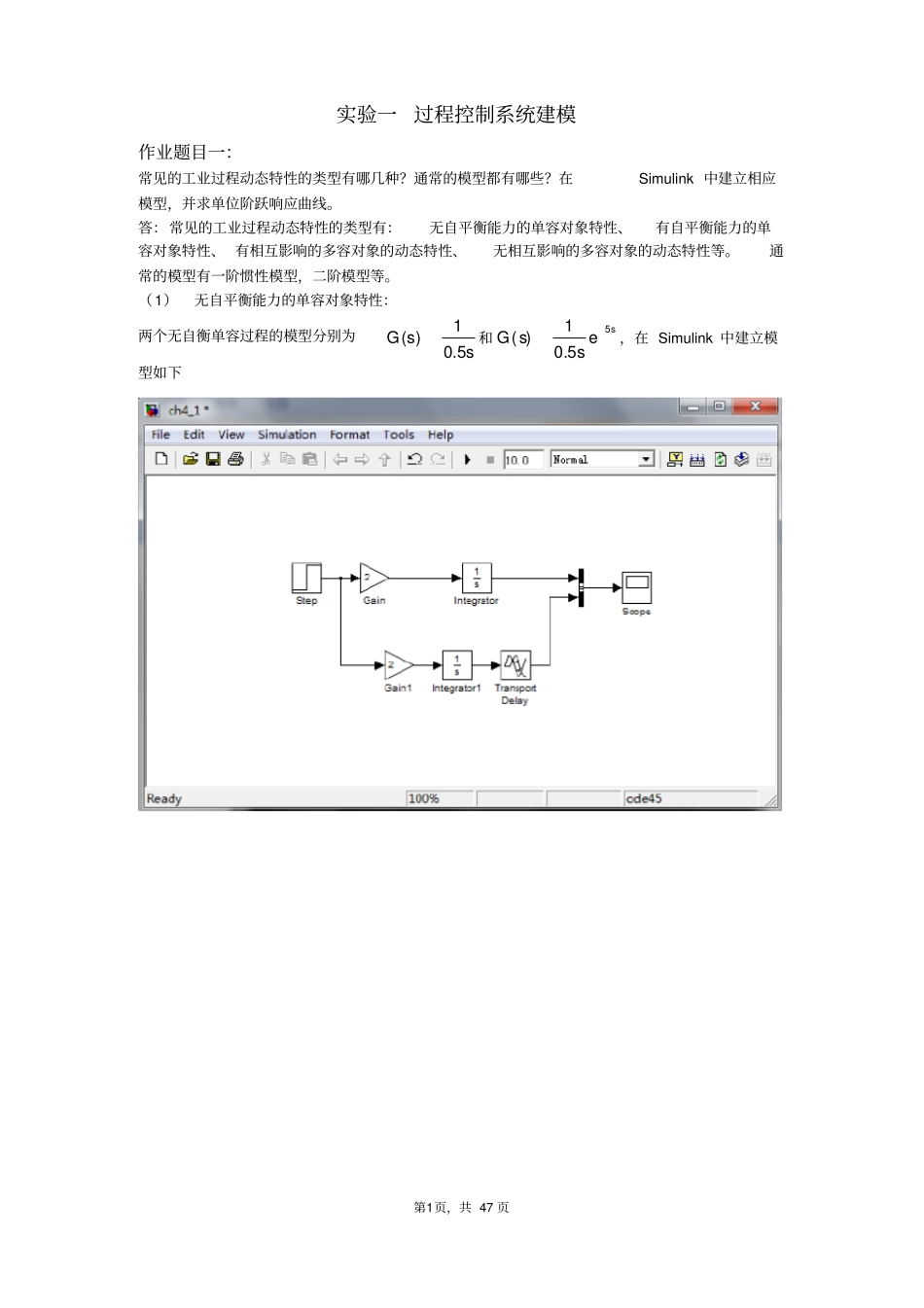
(1)无自平衡能力的单容对象特性:两个无自衡单容过程的模型分别为ssG5
01)(和sessG55
01)(,在Simulink中建立模型如下第2页,共47页单位阶跃响应曲线如下:(2)有自平衡能力的单容对象特性:两个自衡单容过程的模型分别为122)(ssG和sessG5122)(,在Simulink中建立模型如下:第3页,共47页单位阶跃响应曲线如下:(3)有相互影响的多容对象的动态特性:有相互影响的多容过程的模型为121)(22TssTsG,当参数1T,2
0,0时,在Simulink中建立模型如下:第4页,共47页单位阶跃响应曲线如下:(4)无相互影响的多容对象的动态特性:两个无相互影响的多容过程的模型为)1)(12(1)(sssG(多容有自衡能力的对象)和)12(1)(sssG(多容无自衡能力的对象),在Simulink中建立模型如下第5页,共47页单位阶跃响应曲线如下作业题目二:某二阶系统的模型为2()222nGsssnn