磁盘驱动读取系统的分析设计一、闭环系统的性能分析(1)确定使闭环系统稳定的Ka的取值范围>>G1=tf([5000],[1,1000]);>>G2=tf([1],conv([1,0],[1,20]));>>G=series(G1,G2)Transferfunction:5000------------------------s^3+1020s^2+20000sg3=一一开环传函G3=一一闭环传函>>symsKden>>den=[11020200005000*K];>>K=den(2)*den(3)/den(1)/5000K=4080有劳斯判据可得k的范围是0g=100*Gg1=feedback(g,1)C=dcgain(g1)Transferfunction:500000------------------------s^3+1020s^2+20000sTransferfunction:500000---------------------------------s^3+1020s^2+20000s+500000C=1[c,t]=step(g1);>>[y,k]=max(c);>>percentovershoot=100*(y-C)/Cpercentovershoot=21
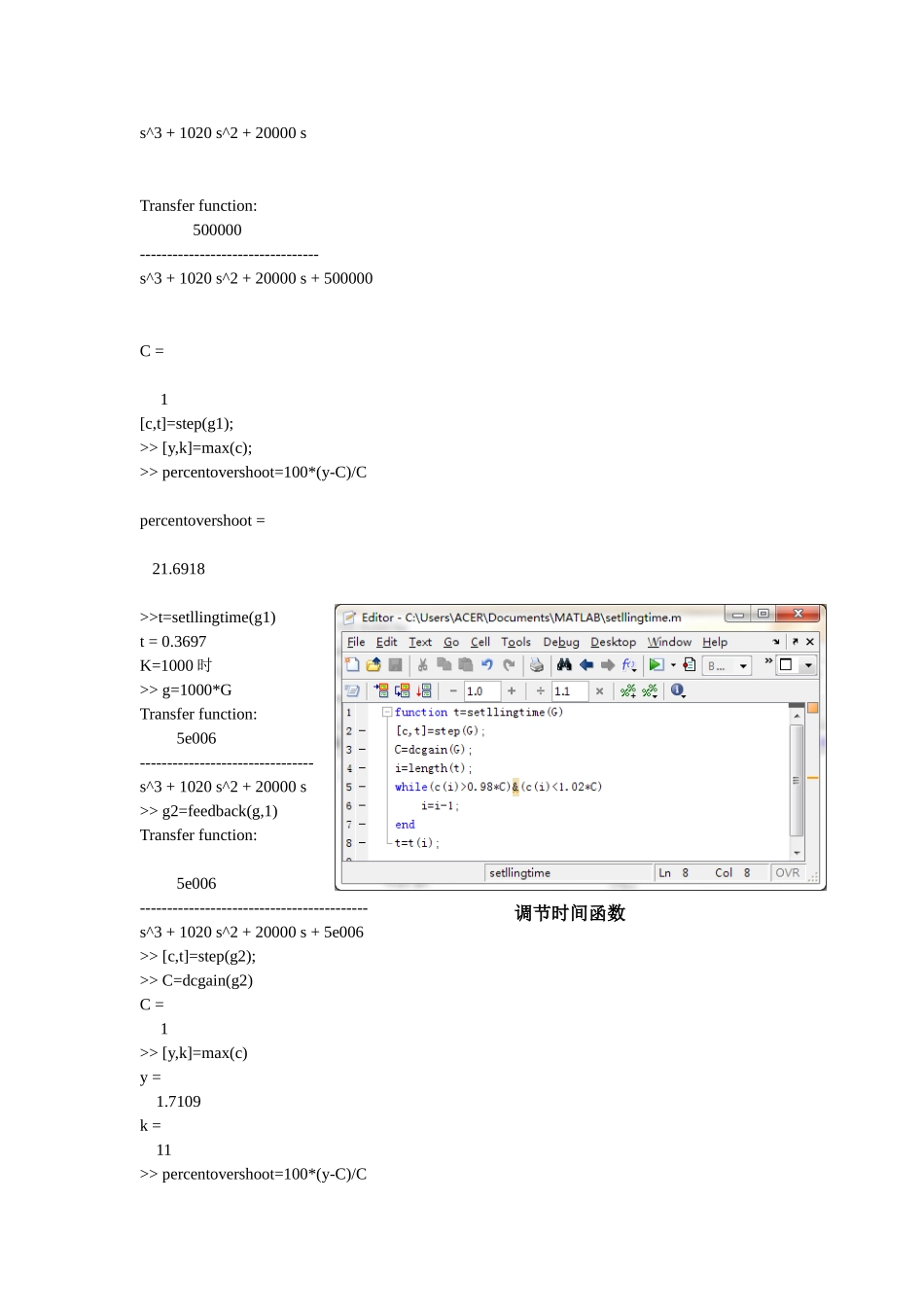
6918>>t=setllingtime(g1)t=0
3697K=1000时>>g=1000*GTransferfunction:5e006--------------------------------s^3+1020s^2+20000s>>g2=feedback(g,1)Transferfunction:5e006------------------------------------------s^3+1020s^2+20000s+5e006>>[c,t]=step(g2);>>C=dcgain