循迹光电传感器原理,利用黑白线对红外线不同的反射能力
然后通过光敏二极管或光敏三极管,接收反射回的不同光强信号,把不同光强转换为电流信号,最后通过电阻,转换为单片机可识别的高低电平
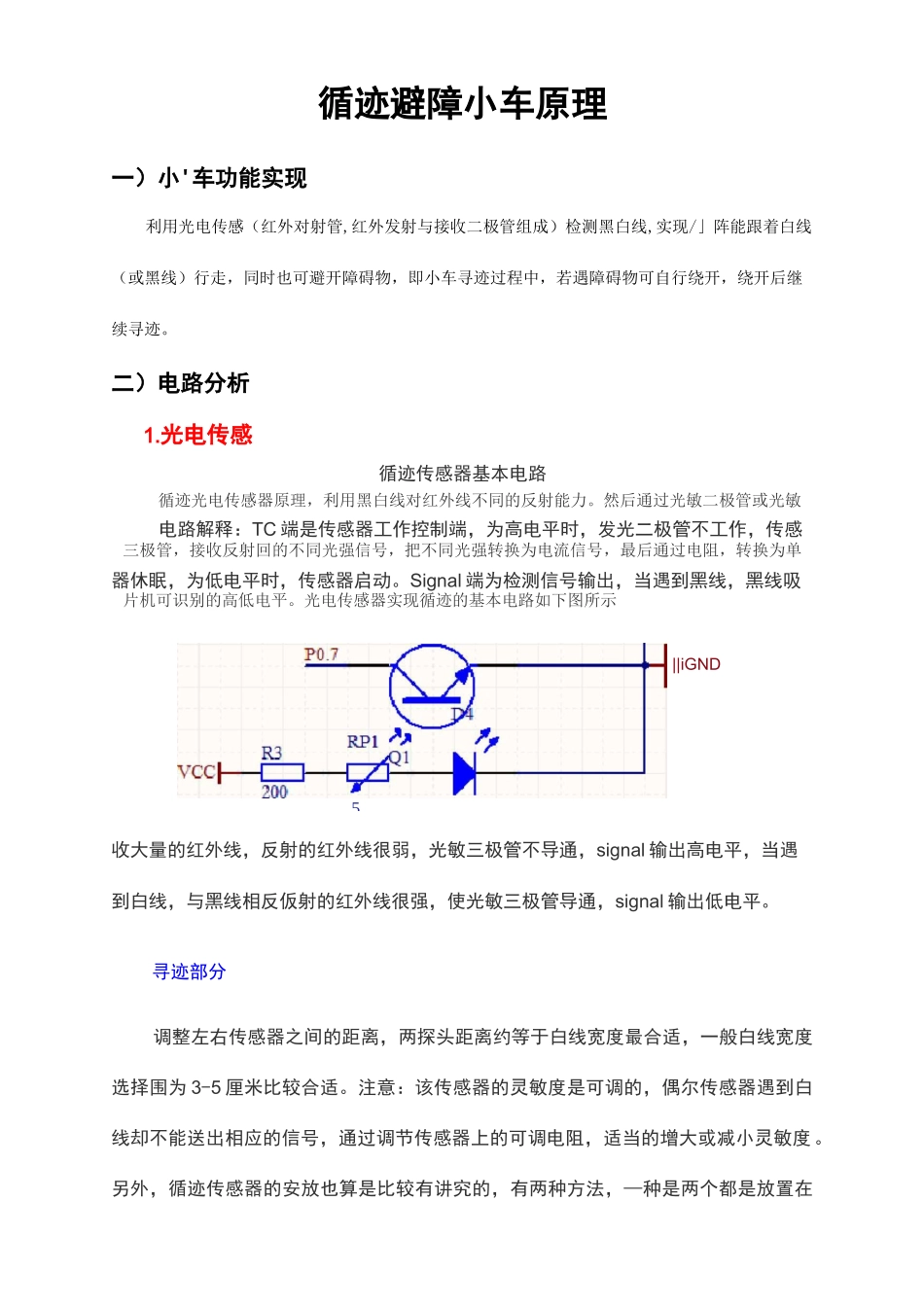
光电传感器实现循迹的基本电路如下图所示5||iGND循迹避障小车原理一)小'车功能实现利用光电传感(红外对射管,红外发射与接收二极管组成)检测黑白线,实现/」阵能跟着白线(或黑线)行走,同时也可避开障碍物,即小车寻迹过程中,若遇障碍物可自行绕开,绕开后继续寻迹
二)电路分析1
光电传感循迹传感器基本电路电路解释:TC端是传感器工作控制端,为高电平时,发光二极管不工作,传感器休眠,为低电平时,传感器启动
Signal端为检测信号输出,当遇到黑线,黑线吸收大量的红外线,反射的红外线很弱,光敏三极管不导通,signal输出高电平,当遇到白线,与黑线相反仮射的红外线很强,使光敏三极管导通,signal输出低电平
寻迹部分调整左右传感器之间的距离,两探头距离约等于白线宽度最合适,一般白线宽度选择围为3-5厘米比较合适
注意:该传感器的灵敏度是可调的,偶尔传感器遇到白线却不能送出相应的信号,通过调节传感器上的可调电阻,适当的增大或减小灵敏度
另外,循迹传感器的安放也算是比较有讲究的,有两种方法,—种是两个都是放置在白线侧但紧贴白线边缘,第二种是都放置在白线的外侧,同样紧贴白线边缘
我们通常采用第二种方法
编写程序使小车遇白线时,小车跟着白线走
当小车先前前进时,如果向左偏离了白线
那么右边传感器会产生一个低电平,单片机判断这个信号,然后向右拐
两传感器输出信号为高电平
如果小车向右偏离白线,左边传感器产生一个低电平,单片机判断这个信号,然后向左拐
如此如此,小车必不偏离白线
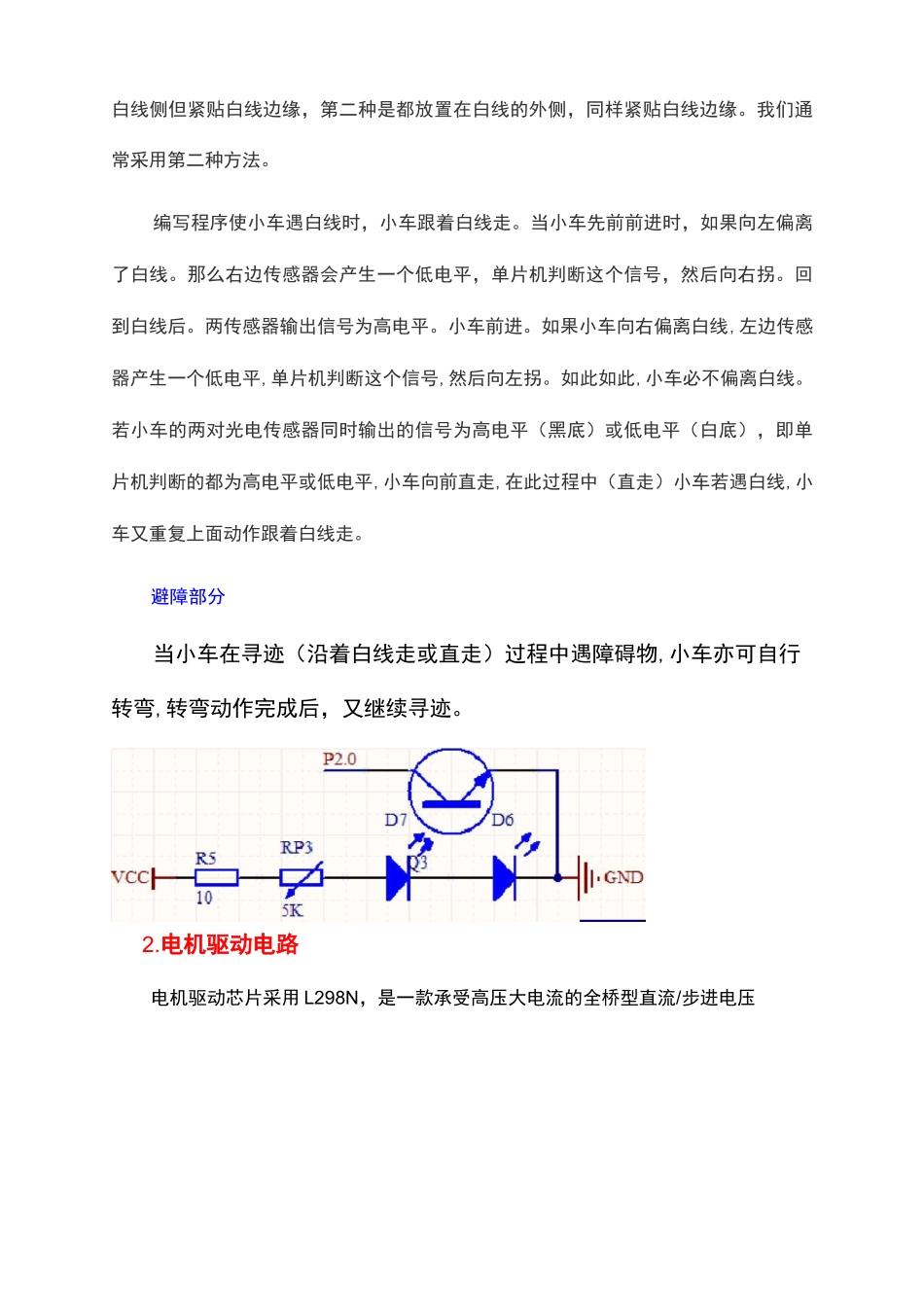
若小车的两对光电传感器同时输出的信号为高电平(黑底)或低电平(白底),即单片机判断的都为高电平或低电平