5一般物体的平衡力对物体的作用可以改变物体的运动状态,物体各部位所受力的合力对物体的平动有影响,合力矩对物体的转动有影响
如果两种影响都没有,就称物体处于平衡状态
因此,一般物体处于平衡时,要求物体所受合外力为零)0(外F和合力矩为零)0(M同时满足,一般物体的平衡条件写成分量式为0xF0xM0yF0yM0zF0zMzyxMMM,,分别为对x轴、y轴、z轴的力矩
由空间一般力系的平衡方程,去掉由力系的几何性质能自动满足的平衡方程,容易导出各种特殊力系的独立平衡方程
如平面力系(设在xOy平面内),则0,0,0yxxMMF自动满足,则独立的平衡方程为:0xF0yF0zF0zM这一方程中的转轴可根据需要任意选取,一般原则是使尽量多的力的力臂为零
平面汇交力系与平面平行力系的独立方程均为二个,空间汇交力系和空间平行力系的独立平衡方程均为三个
6平衡的稳定性1.6.1、重心2/8物体的重心即重力的作用点
在重力加速度g为常矢量的区域,物体的重心是惟一的(我们讨论的都是这种情形),重心也就是物体各部分所受重力的合力的作用点,由于重力与质量成正比,重力合力的作用点即为质心,即重心与质心重合
求重心,也就是求一组平行力的合力作用点
相距L,质量分别为21,mm的两个质点构成的质点组,其重心在两质点的连线上,且21,mm与相距分别为:0)(2121LmLmm0)(1221LmLmm2121mmLmL2112mmLmL均匀规则形状的物体,其重心在它的几何中心,求一般物体的重心,常用的方法是将物体分割成若干个重心容易确定的部分后,再用求同向平行力合力的方法找出其重心
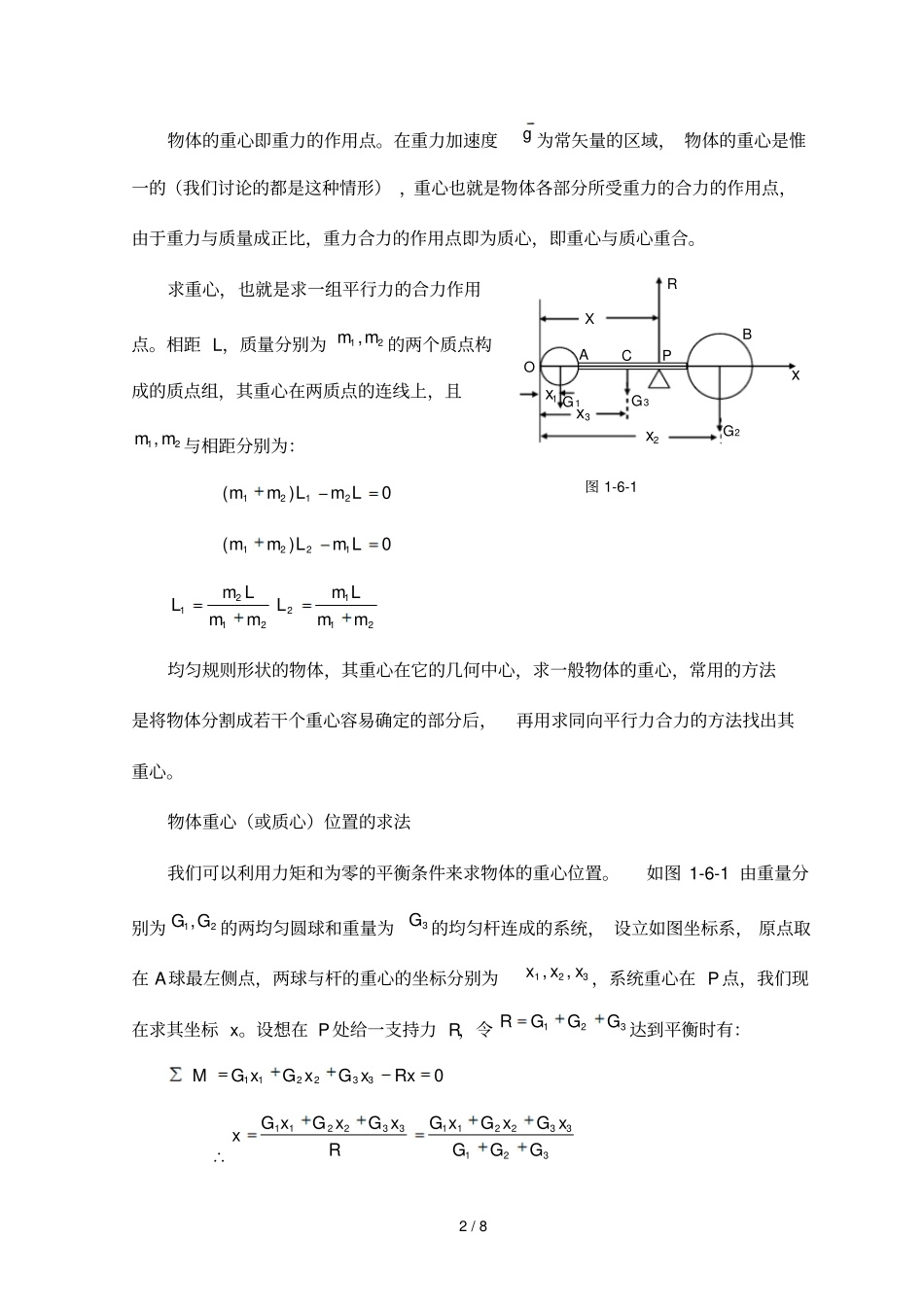
物体重心(或质心)位置的求法我们可以利用力矩和为零的平衡条件来求物体的重心位置
如图1-6-1由重量分别为21,GG的两均匀圆球和重量为3G的均匀杆连成的系统,设立如图坐标系,原点取在A球最左侧点,两球与杆的重心