1三轮机构三轮移动机构具有一定的稳定性,是轮式机器人的基本移动机构之一,在机器人领域已经得到广泛的应用,而且在实现方式上也呈现多样化
1)两轮独立驱动机构两轮独立驱动机构是最常用的一种驱动机构
如图(1),该机构利用一个高精度驱动轮和两个随机轮构成
左右两个驱动轮由两个电动机经过减速器独立驱动,随机轮置于机器人底盘的前方位置
机器人的行进方向由两轮驱动机构的速度差值决定,通过对两个电机施加不同的速度可实现任意方向的驱动,因此属于差分驱动方式
这种结构的特点是运动灵活,机构组成简单;当两轮转速大小相等方向相反时,可以实现机器人本体的灵半径回转
该机构的缺点是对伺服系统的要求较高,如进行严格的直线运动则需保证左右两个轮子的旋转速度完全一样,且在加减速时的动态特性也应完全一致,这就要求伺服驱动系统要求有足够的精度和优异的动态特性,从而会导致机器人底盘的成本增加
2)前轮驱动前轮导向机构如图(2),该机构中的前轮既是驱动轮又是导向轮(操舵轮),采用两个电机分别控制:导向电机控制前轮的转向角度,驱动电机控制前轮的旋转速度
因此,通过对前轮的这两个自由度进行复合控制,可以同时实现对机器人本体的运行速度和运行方向的控制
两个被动后轮没有电机控制,完全是随机轮
该种移动机构的特点是控制比较方便,能耗低,对于伺服系统和制造装备精度要求不高,而且旋转半径可以从0到无穷大连续变化;缺点是由于导向和驱动的驱动器均集中在前轮部分,复合运动结构设计复杂,而且车体本身的运动并不十分灵活
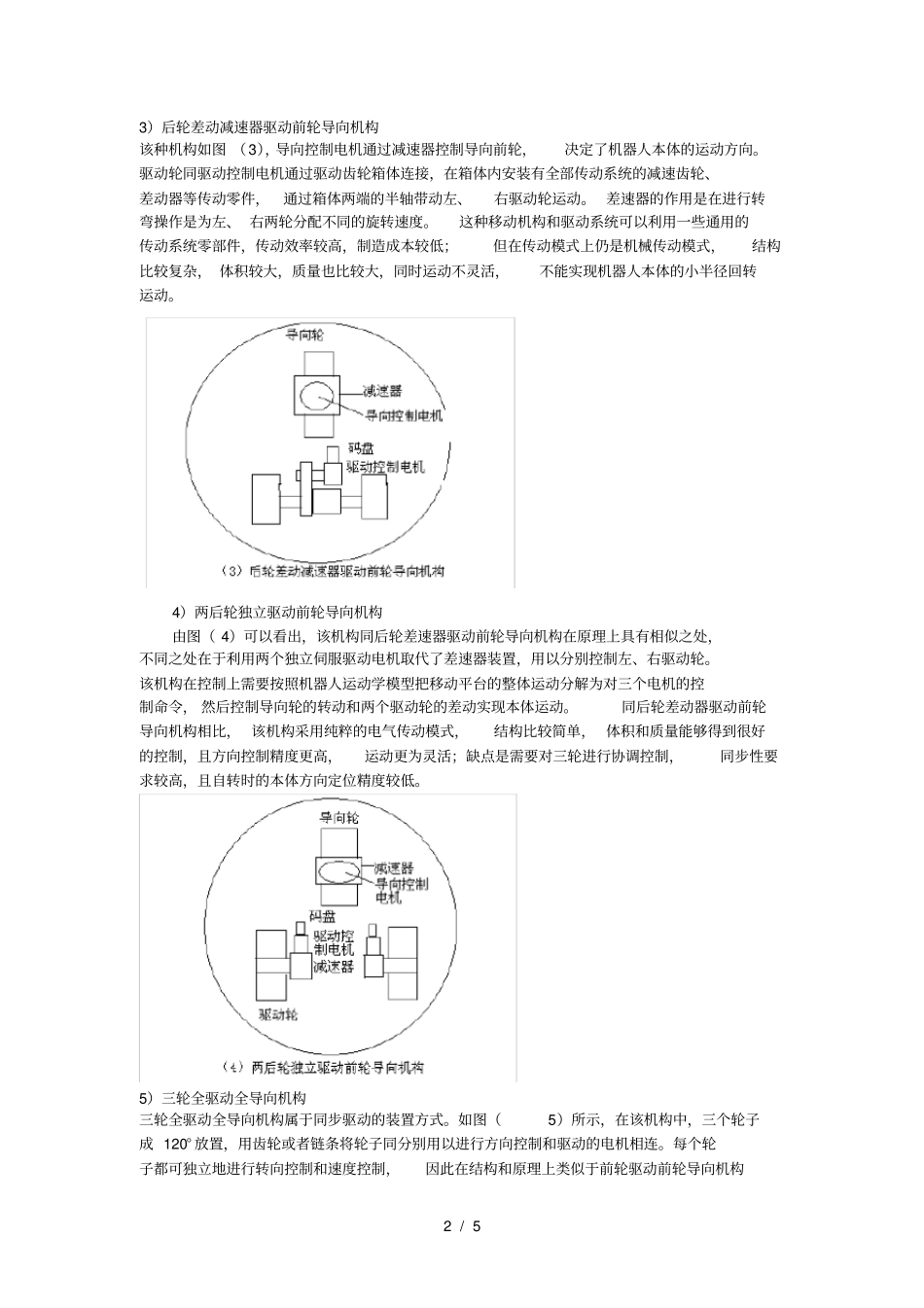
2/53)后轮差动减速器驱动前轮导向机构该种机构如图(3),导向控制电机通过减速器控制导向前轮,决定了机器人本体的运动方向
驱动轮同驱动控制电机通过驱动齿轮箱体连接,在箱体内安装有全部传动系统的减速齿轮、差动器等传动零件,通过箱体两端的半轴带动左、右驱动轮运动
差速器的作用是在进行转弯操作是为左、右两轮分配